Astronomische Koordinatensysteme
Astronomische Koordinatensysteme dienen dazu, die Position von Himmelskörpern anzugeben. In ihnen werden die beiden Winkel von Kugelkoordinaten verwendet. Die Entfernung als dritte Kugelkoordinate entfällt in der Regel, weil sie zum Auffinden für alleiniges Beobachten eines Himmelskörpers unwesentlich ist.
Koordinatenursprung der astronomischen Systeme ist der Beobachter (ein Ort auf der Erdoberfläche, Anblicksprobleme), der Mittelpunkt der Erde (geozentrisches Weltbild), die Sonne (heliozentrisches Weltbild) oder ein anderer Himmelskörper (zum Beispiel ein Planet, um die Lage seiner Monde relativ zu ihm selbst anzugeben), oder ein Raumflugkörper. Er befindet sich in einer zu wählenden Bezugsebene, innerhalb derer die eine der beiden astronomischen Winkelkoordinaten bestimmt wird. Der zweite Winkel wird senkrecht über der Bezugsebene bis zum beobachteten Himmelskörper gemessen. Die willkürlich wählbaren Nullpunkte der Winkelkoordinaten richten sich nach der jeweiligen Anwendung.
Einteilung der Koordinatensysteme
Relative Koordinatensysteme
Relative Koordinatensysteme sind an den Beobachter gebunden. Sie haben ihren Bezugspunkt am Ort des Beobachters, also auf der Erdoberfläche, und werden auch lokale Koordinatensysteme oder topozentrische Koordinatensysteme genannt.
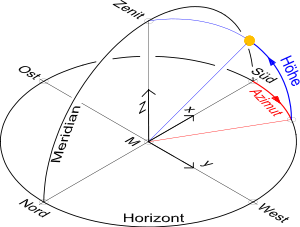
Das Horizont-System ist das jedem Beobachter vertrauteste Koordinatensystem. Er befindet sich in dessen Ursprung, der Horizont ist die Bezugsebene. Der Winkel über Horizont zum Himmelskörper ist dessen Höhe h. Die Abweichung des Punktes, in dem der Meridian durch den Himmelskörper den Horizont schneidet, von der Süd-Richtung ist das Azimut a. Bei Anwendung des Horizontsystems auf der Südhalbkugel ist Nord Bezugsrichtung. Am Äquator und auf den Polen ist das Horizontsystem unbestimmt.
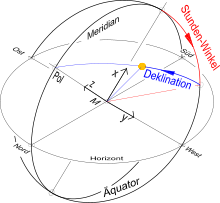
Beim Orts-Äquator-System (ruhendes Äquator-System) befindet sich der Beobachter ebenfalls im Koordinatenursprung. Bezugsebene ist der Himmelsäquator, in der der Stundenwinkel τ auf dem Himmelsäquator vom oberen Schnittpunkt des Ortsmeridians mit dem Himmelsäquator aus bis zum Meridian des Himmelskörpers gemessen wird. Die von der Erdoberfläche aus festgestellten Winkel unterscheiden sich wegen der geringen Ausdehnung der Erde wenig von denen mit Koordinatenursprung im Erdmittelpunkt. Ausnahmen sind Beobachtungen erdnaher Objekte wie z.B. benachbarter Planeten. Sie werden für Vergleichszwecke (z.B. bei einem Venustransit) auf Koordinaten mit Ursprung im Erdmittelpunkt umgerechnet.
Astronauten benutzen im Weltraum an ihren Flugkörper gebundene Koordinatensysteme.
Absolute Koordinatensysteme
Absolute Koordinatensysteme haben ihren Ursprung an einem relativ zum Beobachter neutralen Punkt: im Mittelpunkt von Erde, Sonne oder einem anderen Himmelskörper oder im galaktischen Zentrum. Ihre Bezugsebene ist auch nicht an den Beobachter gebunden, dreht sich also relativ zu ihm.
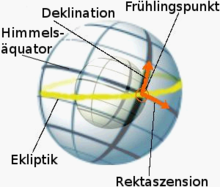
Aus dem oben genannten ortsfesten äquatorialen (geozentrischen) Koordinatensystem geht das rotierende äquatoriale Koordinatensystem hervor. Es hat seinen Ursprung ebenfalls im Erdmittelpunkt, der Bezugspunkt für die Winkelmessung in der Äquatorebene des Himmels ist der im Himmel fixe Frühlingspunkt. Der in der Äquatorebene angegebene Winkel ist die Rektaszension α. Der Deklinationswinkel δ ist mit dem Deklinationswinkel im ruhenden äquatorialen System identisch.
Mit der als Ekliptik bezeichneten Bahnebene, in der die Erde die Sonne einmal im Jahr umrundet, als Bezugsebene werden zwei astronomische Koordinatensysteme definiert. Beim ersten der beiden ekliptikalen Koordinatensysteme befindet sich der Ursprung im Erdmittelpunkt (geozentrisch), beim zweiten im Mittelpunkt der Sonne (heliozentrisch). In beiden Fällen werden die Koordinatenwinkel ekliptikale Länge λ (Bezugspunkt ist der Frühlingspunkt) beziehungsweise ekliptikale Breite β genannt.
Außer topozentrischen (immer relative Systeme), geozentrischen und heliozentrischen werden auch baryzentrische und das galaktische Koordinatensystem verwendet.
Das galaktische Koordinatensystem hat seinen Ursprung im galaktischen Zentrum, seine Bezugsebene ist die Milchstraßenscheibe.
Ein baryzentrisches Koordinatensystem hat zum Beispiel seinen Ursprung im Baryzentrum (gemeinsamer Schwerpunkt), etwa von Erde und Mond, oder im Sonnensystem.
Diese Steme rotieren um den Beobachter. In der Astronomie ist es aber üblich, den Fixsternhimmel als ruhend zu betrachten, daher spricht man von „absolut“, während die beobachterbezogenen Positionen als „scheinbar“ bezeichnet werden
Winkel-Angaben in Stunden anstatt in Grad
Beim Stundenwinkel (ortsfestes äquatoriales Koordinatensystem) und der Rektaszension (rotierendes äquatoriales Koordinatensystem) werden die Angaben in Stunden, Minuten und Sekunden (Stundenmaß oder Zeitmaß) denen in Grad vorgezogen. Der Grund beim Stundenwinkel ist, dass die Änderung des Stundenwinkels der Sonne die Änderung der Tageszeit bestimmt. 15° Änderung sind eine Stunde, das ist ihre ursprüngliche Definition.
Ursache dieses Brauchs bei der Rektaszension ist der Einfluss der Erddrehung, von der sie prinzipiell unabhängig ist, auf die Messung. Zwei Sterne mit 15° Differenz in Rektaszension durchlaufen den Meridiankreis einer Sternwarte mit einer Stunde Unterschied in Sternzeit. Eine Sternzeitstunde ist etwa 10 Sekunden kürzer als eine Stunde. Der Beobachtungsplan in einer Sternwarte richtet sich nach der Sternzeit, die für jeden Stern bekannt und an einer entsprechenden Uhr ablesbar ist. Diese zeigt 0 Uhr Sternzeit, wenn der Frühlingspunkt (ein fiktiver Stern) den Meridiankreis passiert. Die Tageszeit läuft der Sternzeit um einen Tag im Jahr nach, so wie die Sonne (scheinbar) einmal im Jahr rückwärts den Sternenhimmel durchwandert.
Übersichtstabelle
| Koordinaten-System | Koordinaten- Ursprungspunkt |
Fundamental- Ebene |
Pole | Koordinaten | Bezugs-Richtung | |
|---|---|---|---|---|---|---|
| vertikale | horizontale | |||||
| horizontales | Beobachter | Horizont | Zenit / Nadir | Höhenwinkel h | Azimut a | Nord- oder Süd-Punkt des Horizonts |
| äquatoriales "ruhend" |
Beobachter oder Erd-Mittelpunkt |
Himmels-Äquator | Himmels-Pole | Deklinationswinkel δ | Stundenwinkel τ | Meridian des Beobachters |
| äquatoriales "rotierend" |
Erd-Mittelpunkt | Himmels-Äquator | Himmels-Pole | Deklinationswinkel δ | Rektaszension α | Frühlingspunkt |
| ekliptikales | Sonnen-Mittelpunkt | Ekliptik | Ekliptik-Pole | ekliptikale Breite β | ekliptikale Länge λ | Frühlingspunkt |
| galaktisches | Sonnen-Mittelpunkt | galaktische Ebene | galaktische Pole | galaktische Breite b | galaktische Länge l | galaktisches Zentrum |
Umrechnungen
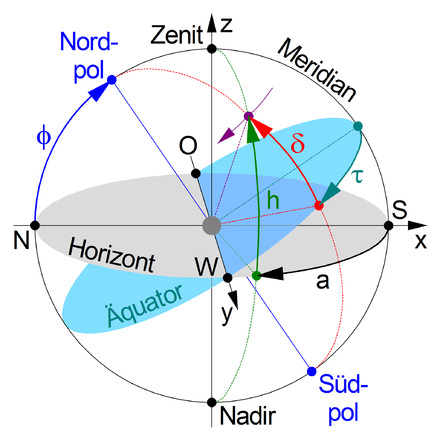
Der Zenit ist senkrecht über dem Beobachter und der Nadir senkrecht unter dem Beobachter im Zentrum der Darstellung.
Der Meridian ist der Großkreis durch Himmelsnord- und Himmelsüdpol sowie die Richtungen Norden (N) und Süden (S) vom Beobachter aus gesehen.
Der Beobachter sieht im Horizontalsystem (graue Scheibe) am Himmel einen Punkt (violett) unter dem Azimut a (schwarz), der vom Meridian aus in der Horizontalebene gemessen wird, und dem Höhenwinkel h (grün), der senkrecht zur Horizontalebene auf dem Großkreis zwischen Zenit und Nadir (grün) gemessen wird, der durch den beobachteten Punkt geht.
Diese Winkel können in die kartesischen Koordinaten x, y und z im Horizontalsystem umgerechnet werden.
Im Äquatorialsystem (türkisfarbene Scheibe) wird der Stundenwinkel τ (cyan) vom Meridian aus in der Äquatorialebene und der Deklinationswinkel δ (rot) senkrecht zur Äquatorialebene auf dem Großkreis bestimmt, der durch die Himmelspole und den beobachteten Punkt geht.
Ostpunkt (O) und Westpunkt (W) sind in beiden Systemen identisch, und die Neigung der beiden Ebenen ist durch die Polhöhe φ (blau) gegeben, die mit dem Breitengrad übereinstimmt, auf dem sich der Beobachter befindet.
Der beobachtete Punkt am Himmel (violett) bewegt sich innerhalb eines halben Tages scheinbar auf einem Halbkreis von Osten nach Westen, der mit konstantem Deklinationswinkel δ parallel zur Äquatorialebene verläuft.
Die Umrechnungen erfolgen über die Darstellungen in kartesische Koordinaten beider Systeme. Zwischen den kartesischen Formen der Systeme findet die Transformation - eine Drehung um die y-Achse - statt (die y-Koordinaten sind in beiden Systemen gleich): Drehung um den Winkel 90°-φ (φ = geographische Breite) im ersten, um den Winkel ε (Schiefe der Ekliptik) im zweiten Fall.
In den folgenden Aufstellungen sind neben den Endergebnissen der Umrechnungen auch die kartesischen Koordinaten x, y und z der Einheitskugel im Zielsystem als Zwischenergebnisse angegeben. Zu beachten ist, dass die beiden ersten Systeme (horizontales und ruhendes äquatoriales) als Links-Systeme, die beiden anderen (rotierendes äquatoriales und geozentrisch-ekliptikales) als Rechts-Systeme definiert sind.
ruhende äquatoriale (τ) ↔ rotierende äquatoriale Koordinate (α)
 = Sternzeit am Ort der
Beobachtung
= Sternzeit am Ort der
Beobachtung


horizontale (a, h) → kartesische Koordinaten → ruhende äquatoriale Koordinaten (τ, δ)
Kartesische Koordinaten im Zielsystem ( ,
,
 )
)



Winkelkoordinaten im Zielsystem


- (hier gilt die Bestimmung des Quadranten gemäß Umrechnung von kartesischen in Polarkoordinaten)
ruhende äquatoriale (τ, δ) → kartesische Koordinaten → horizontale Koordinaten (a, h)
 = geographische Breite
= geographische Breite
Kartesische Koordinaten im Zielsystem ( ,
,
 )
)



Winkelkoordinaten im Zielsystem


- (hier gilt die Bestimmung des Quadranten gemäß Umrechnung von kartesischen in Polarkoordinaten)
rotierende äquatoriale (α, δ) → kartesische Koordinaten → horizontale Koordinaten (a, h)
-
= geographische Breite,
= Sternzeit am Ort der
Beobachtung
Kartesische Koordinaten im Zielsystem (a, h)
Winkelkoordinaten im Zielsystem

- (hier gilt die Bestimmung des Quadranten gemäß Umrechnung von kartesischen in Polarkoordinaten)

rotierende äquatoriale (α, δ) → ekliptikale Koordinaten (λ, β, geozentrisch)
 = 23,44° = Schiefe
der Ekliptik
= 23,44° = Schiefe
der Ekliptik
Kartesische Koordinaten im Zielsystem ( ,
,
 )
)



Winkelkoordinaten im Zielsystem


- oder:

ekliptikale (λ, β, geozentrisch) → rotierende äquatoriale (α, δ) Koordinaten
= 23,44° = Schiefe der Ekliptik
Kartesische Koordinaten im Zielsystem ( ,
)
,
)



Winkelkoordinaten im Zielsystem




© biancahoegel.de
Datum der letzten Änderung: Jena, den: 25.01. 2023