Linearisierung
Bei der Linearisierung werden nichtlineare Funktionen oder nichtlineare Differentialgleichungen durch lineare Funktionen oder durch lineare Differentialgleichungen angenähert. Die Linearisierung wird angewandt, da lineare Funktionen oder lineare Differentialgleichungen einfach berechnet werden können und die Theorie umfangreicher als für nichtlineare Systeme ausgebaut ist.
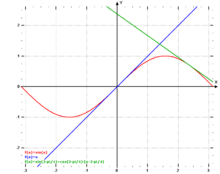
Tangente
 :
:blau

grün

Das einfachste Verfahren zur Linearisierung ist das Einzeichnen der Tangente in den Graphen. Daraufhin können die Parameter der Tangente abgelesen werden, und die resultierende lineare Funktion (Punktsteigungsform der Geraden)

approximiert die Originalfunktion um den Punkt  .
Dabei ist
.
Dabei ist  der Anstieg im Punkt .
der Anstieg im Punkt .
Wenn die Funktion in analytischer Form vorliegt, kann die Gleichung der Tangente direkt angegeben werden.
Der relative Fehler der Approximation ist

Für die Funktion
gilt beispielsweise:

Die Bestimmung der Tangente entspricht der Bestimmung des linearen Glieds des Taylorpolynoms der zu approximierenden Funktion.
Anwendungen
Anwendung findet die Linearisierung unter anderem in der Elektrotechnik und der Regelungstechnik zur näherungsweisen Beschreibung nichtlinearer Systeme durch lineare Systeme.
Das Ergebnis einer Netzwerkanalyse ist unter Umständen ein nichtlineares Gleichungssystem. Dies kann unter gewissen Voraussetzungen in ein lineares Gleichungssystem überführt werden. Nicht die einzige, aber die einfachste Methode der Linearisierung ist die Linearisierung in einem Arbeitspunkt (kurz „AP“). Nur diese ist in den folgenden Abschnitten beschrieben.
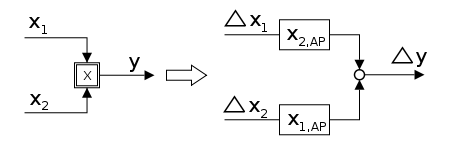
Linearisierung der Multiplikation
In einem Signalflussplan lassen sich komplexe Systeme durch ein Blockbild darstellen, das zur qualitativen Visualisierung von mathematischen Modellen dient.

(Arbeitspunkte
 ,
,
 und
und  wurden zur übersichtlicheren Darstellung weggelassen)
wurden zur übersichtlicheren Darstellung weggelassen)Befindet sich in diesem Signalflussplan eine Multiplikationsstelle, so lässt sich diese durch Linearisierung in eine Additionsstelle umwandeln.
Im Folgenden bezeichnen wir mit  das Produkt zweier Zahlen
das Produkt zweier Zahlen  und
und  :
:

Im Arbeitspunkt können wir die Multiplikation linearisieren, indem wir
als Summe des Arbeitspunkts und der Differenz  schreiben:
schreiben:

Wir können dieses Produkt nach dem Distributivgesetz ausmultiplizieren. Es ergibt sich die Summe:

Wir nehmen nun an, dass das Verhältnis der Abweichungen vom Arbeitspunkt
 und dem Arbeitspunkt selber klein ist:
und dem Arbeitspunkt selber klein ist:
 und somit auch das Produkt
und somit auch das Produkt  klein ist. Die linearisierte Multiplikation lautet also:
klein ist. Die linearisierte Multiplikation lautet also:

Beispiel
Wähle die Zahlen:

Nun stellt sich, die Frage, wie die Arbeitspunkte zu wählen sind. Um die
Rechnung zu vereinfachen, runden wir  auf
auf  ab und
ab und  auf
auf  ab: Wähle also:
ab: Wähle also:  Das linearisierte Produkt ist also
Das linearisierte Produkt ist also

mit dem Fehler  .
.
Linearisierung der Division
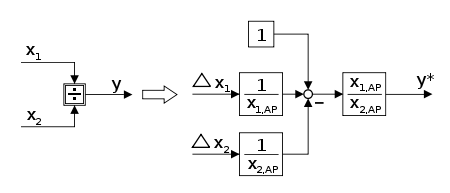
Wir betrachten nun den Quotienten
zweier Zahlen
und :

Analog wie zur Multiplikation entwickeln wir  um den Arbeitspunkt
um den Arbeitspunkt  .
Damit können wir den Quotienten wie folgt schreiben:
.
Damit können wir den Quotienten wie folgt schreiben:

Ausklammern der Arbeitspunkte liefert für Division:

Wir wollen nun den Zähler und den Nenner des Bruches linearisieren. Dazu
verwenden wir die geometrische
Reihe. Für eine Nullfolge  gilt:
gilt:

Hierbei ist entsprechend  mit
mit  zu wählen.
zu wählen.
Einsetzen liefert die Linearisierung

Analog lässt sich der Nenner des obigen Bruchs linearisieren. Die linearisierte Division lässt sich schreiben durch:

Linearisieren gewöhnlicher Differentialgleichungen
Ein bekanntes Beispiel für die Linearisierung einer nichtlinearen Differentialgleichung ist das Pendel. Die Gleichung lautet:

Der nichtlineare Teil ist  .
Dieser wird für kleine Schwankungen um einen Arbeitspunkt
.
Dieser wird für kleine Schwankungen um einen Arbeitspunkt  approximiert durch:
approximiert durch:

Mit dem Arbeitspunkt  gilt:
gilt:
 und damit die linearisierte Differenzialgleichung
und damit die linearisierte Differenzialgleichung .
.
Diese linearisierten Differentialgleichungen sind meist deutlich einfacher zu
lösen. Für ein mathematisches Pendel (wähle  )
lässt die Gleichung durch einfache Exponentialfunktionen lösen, wobei die
nicht-linearisierte nicht analytisch lösbar ist. Weitere Details über das
Linearisieren von Differentialgleichungen sind in dem Artikel über die Zustandsraumdarstellung
beschrieben.
)
lässt die Gleichung durch einfache Exponentialfunktionen lösen, wobei die
nicht-linearisierte nicht analytisch lösbar ist. Weitere Details über das
Linearisieren von Differentialgleichungen sind in dem Artikel über die Zustandsraumdarstellung
beschrieben.
Tangentialebene
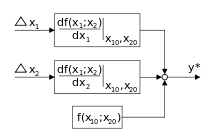
Soll eine gegebene Funktion  in einem Punkt
in einem Punkt  linearisiert werden, wird sich der Taylor-Formel
bedient. Das Ergebnis entspricht der Tangentialebene
in diesem Punkt.
linearisiert werden, wird sich der Taylor-Formel
bedient. Das Ergebnis entspricht der Tangentialebene
in diesem Punkt.
Für die Funktion
gilt in der Umgebung des Punktes :

Beispiel:

ergibt die Tangentialebene

Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 03.09. 2022