Doppelpendel

Das Doppelpendel ist ein beliebtes Modell zur Demonstration von chaotischen Prozessen.
Es ist zugleich eines der einfachsten nichtlinearen
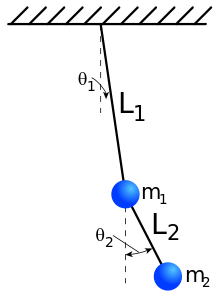
Dynamischen Systeme, welches chaotisches Verhalten zeigt. An die Masse  eines Pendels
mit der Länge
eines Pendels
mit der Länge  wird ein weiteres Pendel der Länge
wird ein weiteres Pendel der Länge  mit Masse
mit Masse  gehängt. Die Herleitung der Bewegungsgleichung zum Berechnen der Bewegung des
Doppelpendels lässt sich vereinfachen, wenn man starre, masselose Pendelstangen
und Reibungsfreiheit annimmt.
gehängt. Die Herleitung der Bewegungsgleichung zum Berechnen der Bewegung des
Doppelpendels lässt sich vereinfachen, wenn man starre, masselose Pendelstangen
und Reibungsfreiheit annimmt.
Ein Merkmal eines chaotischen Systems ist, dass es Anfangsbedingungen  gibt, sodass ein weiteres Experiment mit nahezu identischen Anfangsbedingungen
gibt, sodass ein weiteres Experiment mit nahezu identischen Anfangsbedingungen
 ,
die sich nur um eine infinitesimale Störung
,
die sich nur um eine infinitesimale Störung  unterscheiden, nach kurzer Zeit ein anderes Verhalten zeigt. Diese sensible
Abhängigkeit lässt sich durch Berechnen von Ljapunow-Exponenten
der Trajektorien
charakterisieren.
unterscheiden, nach kurzer Zeit ein anderes Verhalten zeigt. Diese sensible
Abhängigkeit lässt sich durch Berechnen von Ljapunow-Exponenten
der Trajektorien
charakterisieren.
Herleitung der Bewegungsgleichungen
Wenn  und
und  die Längen der (masselosen) Verbindungsstangen,
und
die Pendelmassen,
die Längen der (masselosen) Verbindungsstangen,
und
die Pendelmassen,  die Auslenkung vom Lot und
die Auslenkung vom Lot und  die Erdbeschleunigung bezeichnet, dann findet man für die Positionen von
und :
die Erdbeschleunigung bezeichnet, dann findet man für die Positionen von
und :

und

Damit lassen sich die Geschwindigkeiten der Massen, welche für den nächsten
Schritt notwendig sind, bestimmen, wobei  die zeitliche Ableitung von
die zeitliche Ableitung von  ist:
ist:

und

Unter Verwendung des Lagrange-Formalismus
 wobei
wobei  die kinetische
Energie der beiden Pendelmassen und
die kinetische
Energie der beiden Pendelmassen und  ihre potentielle
Energie im konstanten Gravitationsfeld ist, mit
ihre potentielle
Energie im konstanten Gravitationsfeld ist, mit

erhält man

Damit ergibt sich für die Lagrange-Funktion dann

Unter Verwendung der Euler-Lagrange-Gleichung

erhält man damit nach einigen Umformungen

die Winkelbeschleunigungen für
und  ,
welche die Evolution des Pendels beschreiben.
,
welche die Evolution des Pendels beschreiben.
In den Bewegungsgleichungen treten Winkelfunktionen  der Zustandsgrößen und auch Ableitungen auf. Es handelt sich also um ein
nichtlineares System. Im Spezialfall kleiner Auslenkungen als Anfangsbedingungen
der Zustandsgrößen und auch Ableitungen auf. Es handelt sich also um ein
nichtlineares System. Im Spezialfall kleiner Auslenkungen als Anfangsbedingungen
 ,
lassen sich die Bewegungsgleichungen allerdings mittels der Kleinwinkelnäherung
vereinfachen. Dann lassen sich beispielsweise weitere Spezialfälle wie
,
lassen sich die Bewegungsgleichungen allerdings mittels der Kleinwinkelnäherung
vereinfachen. Dann lassen sich beispielsweise weitere Spezialfälle wie  oder
oder  mit analytischen Ansätzen betrachten, die eine näherungsweise harmonische Lösung
haben; diese kann auch analytisch bestimmt werden.
mit analytischen Ansätzen betrachten, die eine näherungsweise harmonische Lösung
haben; diese kann auch analytisch bestimmt werden.
Lösung der Bewegungsgleichungen
Die Bewegungsgleichungen für die generalisierten
Koordinaten  und
und  stellen ein nichtlineares System von zwei gekoppelten Differentialgleichungen
dar, welches analytisch nicht lösbar ist. Es kann bei vier bekannten Anfangswerten (
stellen ein nichtlineares System von zwei gekoppelten Differentialgleichungen
dar, welches analytisch nicht lösbar ist. Es kann bei vier bekannten Anfangswerten ( )
mit numerischen
Verfahren gelöst werden. Hierbei werden also die anfänglichen Auslenkungen
(z.B. 30° und 30°) und die anfänglichen Geschwindigkeiten
(z.B.
)
mit numerischen
Verfahren gelöst werden. Hierbei werden also die anfänglichen Auslenkungen
(z.B. 30° und 30°) und die anfänglichen Geschwindigkeiten
(z.B.  und )
eingegeben und damit dann die Evolution des Pendels berechnet.
und )
eingegeben und damit dann die Evolution des Pendels berechnet.
Mittels Trigonometrie
können die Winkel
und
in die kartesischen Koordinaten  der Massenpunkte überführt werden.
der Massenpunkte überführt werden.
Anwendungen
Eine Kirchenglocke mit Klöppel bildet ein Doppelpendel.
Auswertung des chaotischen Verhaltens
Zur Betrachtung des chaotischen Verhaltens des Doppelpendels gibt es eine Reihe von Möglichkeiten. Oft kann mittels einfachster Berechnungen eine Aussage über chaotisches Verhalten getroffen werden. Beispiele sind der maximale Ljapunow-Exponent (MLE) oder Bifurkationsdiagramme.
Maximaler Ljapunow-Exponent
Der MLE ist der sog. maximaler Ljapunow-Exponent (maximum Lyapunov exponent) und beschreibt die „Stärke“ des chaotischen Verhaltens. Er ist Bestandteil des Ljapunow-Spektrums welches alle Ljapunow-Exponenten (je einer pro Freiheitsgrad) beinhaltet. Man geht davon aus, dass das System eine Störung in der Richtung des MLE hat und da er das größte Wachstum zeigt, ist zu erwarten, dass der MLE nach einer gewissen Zeit die Evolution des Systems dominiert. Ein positiver MLE zeigt normalerweise ein chaotisches System an. Er wird berechnet mit:

Bei zwei Experimenten mit einer anfänglichen Separation von  in den Anfangsbedingungen oder sogar weniger, verstärkt sich diese Differenz
exponentiell und lässt die Trajektorien divergieren. Die
Separation (der natürliche Logarithmus der obigen Gleichung) kann dann in einem
halblogarithmischen Diagramm gegen die Zeit aufgetragen werden. Dann wird
mittels linearer Regression die Steigung bestimmt und diese gibt dann den
approximierten MLE.
in den Anfangsbedingungen oder sogar weniger, verstärkt sich diese Differenz
exponentiell und lässt die Trajektorien divergieren. Die
Separation (der natürliche Logarithmus der obigen Gleichung) kann dann in einem
halblogarithmischen Diagramm gegen die Zeit aufgetragen werden. Dann wird
mittels linearer Regression die Steigung bestimmt und diese gibt dann den
approximierten MLE.
Bifurkationsdiagramm
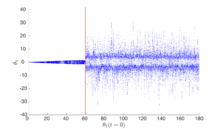
 für
für  bei
bei  .
Die rote Linie zeigt die Bifurkation des Doppelpendels von harmonischen
Oszillationen zu chaotischen Oszillationen.
.
Die rote Linie zeigt die Bifurkation des Doppelpendels von harmonischen
Oszillationen zu chaotischen Oszillationen.Bifurkationsdiagramme sind eine Möglichkeit komplexe Informationen über den Phasenraum eines dynamischen Systems in einen zweidimensionalen, visualisierbaren Plot zu komprimieren. Üblicherweise wird die qualitative Änderungen des Verhaltens eines Systems mittels der Variation eines geeigneten Parameters untersucht. So können für das Doppelpendel bspw. das Verhältnis der Massen, das Verhältnis der Längen, die Erdbeschleunigung oder die Anfangsbedingungen herangezogen werden. Durch die kontinuierliche Veränderung des gewählten Bifurkationsparameters wird das System auf Stabilität (periodische, quasi-periodische Lösungen) bzw. auf Chaos geprüft.
Wenn man die anfänglichen Winkel  als den Bifurkationsparameter wählt, lässt sich das qualitativ veränderliche
Verhalten des Doppelpendels sehr gut veranschaulichen. Dazu werden die beiden
Winkel simultan Stück für Stück erhöht und für jedes Inkrement wird das
Doppelpendel erneut integriert (berechnet). Mit diesen Daten lässt sich dann
veranschaulichen, wie das System schwingt. Man hat also einen vier-dimensionalen
Phasenraum, der sich aus
als den Bifurkationsparameter wählt, lässt sich das qualitativ veränderliche
Verhalten des Doppelpendels sehr gut veranschaulichen. Dazu werden die beiden
Winkel simultan Stück für Stück erhöht und für jedes Inkrement wird das
Doppelpendel erneut integriert (berechnet). Mit diesen Daten lässt sich dann
veranschaulichen, wie das System schwingt. Man hat also einen vier-dimensionalen
Phasenraum, der sich aus  zusammensetzt. Praktischerweise oszillieren die Winkelgeschwindigkeiten
zusammensetzt. Praktischerweise oszillieren die Winkelgeschwindigkeiten  ,
obwohl mit unbestimmter Amplitude, um Null. Daher ist zu erwarten, dass beide
immer wieder die Null überqueren. Für ein harmonisch schwingendes System
(periodische Lösung) sind die Nullüberquerungen von
,
obwohl mit unbestimmter Amplitude, um Null. Daher ist zu erwarten, dass beide
immer wieder die Null überqueren. Für ein harmonisch schwingendes System
(periodische Lösung) sind die Nullüberquerungen von  an festen Punkten, da das System immer an bestimmten Punkten (
an festen Punkten, da das System immer an bestimmten Punkten ( )
seine Auf- und Abwärtsbewegung beendet und zurückschwingt. Das ist vergleichbar
mit einem normalen
starren Pendel. Daher ist im Umkehrschluss zu erwarten, dass das chaotisch
schwingende System an allen möglichen Punkten ()
die Winkelgeschwindigkeit Null zeigt. Wenn man dann eine "Scheibe" aus dem
Phasenraum gesondert betrachtet, bspw. Winkelgeschwindigkeit
)
seine Auf- und Abwärtsbewegung beendet und zurückschwingt. Das ist vergleichbar
mit einem normalen
starren Pendel. Daher ist im Umkehrschluss zu erwarten, dass das chaotisch
schwingende System an allen möglichen Punkten ()
die Winkelgeschwindigkeit Null zeigt. Wenn man dann eine "Scheibe" aus dem
Phasenraum gesondert betrachtet, bspw. Winkelgeschwindigkeit  ,
kann man die Bifurkation des Verhaltens zwei-dimensional darstellen, indem man
die Winkelgeschwindigkeit
,
kann man die Bifurkation des Verhaltens zwei-dimensional darstellen, indem man
die Winkelgeschwindigkeit  gegen die veränderliche Anfangsbedingung aufträgt (siehe rechts).
gegen die veränderliche Anfangsbedingung aufträgt (siehe rechts).


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 07.11. 2019