Virtuelle Arbeit
Virtuelle Arbeit ist ein Konzept der Analytischen Mechanik bzw. der Technischen Mechanik und bezeichnet sowohl die Arbeit, die eine Kraft an einem System bei einer virtuellen Verschiebung verrichtet, als auch die Arbeit, die eine virtuelle Kraft an einer realen Verschiebung leistet. Unter einer virtuellen Verschiebung versteht man eine Gestalt- oder Lageänderung des Systems, die mit den Bindungen (z.B. Lager) verträglich und „instantan“, sonst aber willkürlich und außerdem infinitesimal klein ist. Das Prinzip der virtuellen Arbeit resultiert aus dem Prinzip der virtuellen Leistung und wird ebenso zur Berechnung des Gleichgewichts in der Statik und zum Aufstellen von Bewegungsgleichungen (d’Alembertsches Prinzip) verwendet.
Beschreibung
Virtuelle Verschiebung, virtuelle Arbeit
Im Folgenden wird ein N-Teilchensystem betrachtet, das durch Zwangsbedingungen eingeschränkt ist.
Eine virtuelle Verschiebung  ist eine fiktive infinitesimale Verschiebung des
ist eine fiktive infinitesimale Verschiebung des  -ten
Teilchens, die mit den Zwangsbedingungen verträglich ist. Die Abhängigkeit von
der Zeit wird nicht betrachtet.[Anm
1]
-ten
Teilchens, die mit den Zwangsbedingungen verträglich ist. Die Abhängigkeit von
der Zeit wird nicht betrachtet.[Anm
1]
Die  holonomen Zwangsbedingungen,
holonomen Zwangsbedingungen,  ,
werden durch Verwendung von
,
werden durch Verwendung von  sogenannter generalisierter
Koordinaten
sogenannter generalisierter
Koordinaten  erfüllt:
erfüllt:

(Die holonomen Zwangsbedingungen werden also durch Auswahl und entsprechende Reduzierung der generalisierten Koordinaten explizit eliminiert.)
Zur Erfüllung auch der anholonomen Zwangsbedingungen unterliegen die
 [Anm
2] weiteren Bedingungen, z.B.
[Anm
2] weiteren Bedingungen, z.B.  differentiellen nicht-integrablen Gleichungen:
differentiellen nicht-integrablen Gleichungen:

Die virtuelle Arbeit, die die Kraft  bei virtueller Verschiebung
am -ten
Teilchen verrichten würde, ist:
bei virtueller Verschiebung
am -ten
Teilchen verrichten würde, ist:

System im Gleichgewicht
Ist das  -Teilchensystem
im Gleichgewicht, so ist für jedes Teilchen die Beschleunigung gleich Null:
-Teilchensystem
im Gleichgewicht, so ist für jedes Teilchen die Beschleunigung gleich Null:

Daher muss die resultierende Kraft auf jedes Teilchen gleich Null sein:

Ist das System im Gleichgewicht, ist die virtuelle Arbeit der Kraft
bei Verschiebung
gleich Null, da die Kraft selbst verschwindet:

Somit ist auch die Summe über die von allen Kräften bei virtuellen Verschiebungen geleistete Arbeit gleich Null:

Die resultierenden Kräfte
kann man zusammensetzen aus eingeprägten Kräften  und Zwangskräften
und Zwangskräften  :
:

Eingesetzt in obige Beziehung:

Prinzip der virtuellen Arbeit
Meist steht die Zwangskraft
senkrecht zur virtuellen Verschiebung ,
so dass  gilt. Dies ist z.B. der Fall, wenn die Bewegung auf Kurven oder Flächen
begrenzt ist.
gilt. Dies ist z.B. der Fall, wenn die Bewegung auf Kurven oder Flächen
begrenzt ist.
Es gibt allerdings Systeme, bei denen einzelne Zwangskräfte Arbeit verrichten
 .
.
Das Prinzip der virtuellen Arbeit fordert nun, dass die Summe aller von den Zwangskräften verrichteten virtuellen Arbeiten bei einem System im Gleichgewicht verschwindet:

Für die eingeprägten Kräfte bedeutet das Prinzip der virtuellen Arbeit:

Man beachte, dass das Prinzip der virtuellen Arbeit nur ein Gleichgewichtsprinzip der Statik ist. Die Erweiterung auf die Dynamik liefert das D’Alembertsche Prinzip.
Prinzip der virtuellen Arbeit in konservativen Systemen
In konservativen Systemen sind alle eingeprägten Kräfte von einem Potential  ableitbar:
ableitbar:

In diesem Fall lässt sich das Prinzip der virtuellen Arbeit

in der Form

darstellen. Hierbei ist das Symbol  als Variationszeichen im Sinne der Variationsrechnung
aufzufassen.
als Variationszeichen im Sinne der Variationsrechnung
aufzufassen.  bedeutet damit die erste Variation der
Potentiellen
Energie.
bedeutet damit die erste Variation der
Potentiellen
Energie.
Beispiel
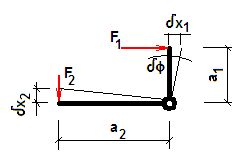
An einem Winkelhebel, der auf einer Achse frei drehbar gelagert ist, greifen
2 eingeprägte
Kräfte  und
und  an. Die virtuellen Verschiebungen der Kraftangriffspunkte sind
an. Die virtuellen Verschiebungen der Kraftangriffspunkte sind  und
und  .
Die virtuelle Arbeit der eingeprägten Kräfte ist damit
.
Die virtuelle Arbeit der eingeprägten Kräfte ist damit

Weil der Winkelhebel
als starr angesehen wird, sind die Größen
und
nicht unabhängig voneinander. Ihre Abhängigkeit kann man durch die Variation
 der generalisierten
Koordinate
der generalisierten
Koordinate  ausdrücken:
ausdrücken:

Damit wird die virtuelle Arbeit:

Da die Gleichung für beliebige
gilt, muss der Klammerausdruck identisch 0 sein:

Also bleibt das System im Gleichgewicht, d.h. es kippt weder nach rechts noch nach links, wenn die Kräfte multipliziert mit ihrer Achsdistanz gleich groß sind.
Prinzip der virtuellen Arbeit für dynamische Systeme
Die virtuelle Arbeit der Zwangskräfte bzw. -momente ist bei dynamischen Systemen gleich Null. Drückt man die virtuellen Verschiebungen in den verallgemeinerten Koordinaten aus, können mit dem Prinzip der virtuellen Arbeit Bewegungsgleichungen für große Mehrkörpersysteme aufgestellt werden.
Alternativen
Neben dem Prinzip der virtuellen Arbeit wird auch das Prinzip der virtuellen Leistung verwendet. Der wesentliche Unterschied dieses Prinzips liegt darin, dass statt virtuelle Verschiebungen hier virtuelle Geschwindigkeitsvariationen benutzt werden. In der Statik findet dieses Prinzip selten Anwendung, jedoch erweist sich dessen Erweiterung auf dynamische Systeme, das sogenannte Prinzip von Jourdain, vorteilhaft, da dort sehr elegant nichtholonome Bindungen berücksichtigt werden können.
Anmerkungen
- ↑
Aus dem totalen Differential einer Funktion
 ,
also einem Ausdruck der Form
,
also einem Ausdruck der Form  ,
entsteht die gesuchte virtuelle Änderung
,
entsteht die gesuchte virtuelle Änderung  .
Der Begriff „instantan“ ist dadurch mathematisiert.
.
Der Begriff „instantan“ ist dadurch mathematisiert. - ↑ Die verallgemeinerten Koordinaten können von der Zeit abhängen, obwohl das erneut nicht eingeht, da nur der momentane Wert benötigt wird.
Literatur
- Herbert Goldstein, Charles P. Poole, John L. Safko: Klassische Mechanik. 3. Auflage. Wiley-VCH, 2006, ISBN 978-3-527-40589-3.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 24.04. 2021