Deformationsinvarianten
Die Deformationsinvarianten  bezeichnen in der Kontinuumsmechanik
die drei Hauptinvarianten
des rechten oder linken Cauchy-Green Deformationstensors.
Sie stellen die Koeffizienten
des charakteristischen
Polynoms bei Hauptachsentransformation
des Strecktensors dar. Gleichzeitig lassen sie sich nach dem Satz von Vieta auch
durch die Hauptstreckungen
bezeichnen in der Kontinuumsmechanik
die drei Hauptinvarianten
des rechten oder linken Cauchy-Green Deformationstensors.
Sie stellen die Koeffizienten
des charakteristischen
Polynoms bei Hauptachsentransformation
des Strecktensors dar. Gleichzeitig lassen sie sich nach dem Satz von Vieta auch
durch die Hauptstreckungen
 ausdrücken:
ausdrücken:

mit
 der Deformationstensor
der Deformationstensor der Spur
des Deformationstensors,
der Spur
des Deformationstensors, der Determinante des
Deformationstensors,
der Determinante des
Deformationstensors, der Inversen
des Deformationstensors und
der Inversen
des Deformationstensors und der Eigenwerte des Deformationstensors.
der Eigenwerte des Deformationstensors.
Obige Zusammenhänge gelten für den linken Cauchy-Green Tensor  und den rechten Cauchy-Green Tensor
und den rechten Cauchy-Green Tensor  ,
denn beide Tensoren haben wegen
,
denn beide Tensoren haben wegen

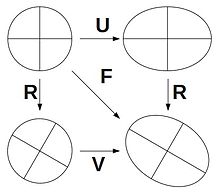
dieselben Eigenwerte und damit auch dieselben Invarianten, was sie einander mathematisch ähnlich macht. Der Tensor F ist der Deformationsgradient. Gleiches gilt für die symmetrischen, positiv definiten, rechten und linken Deformationstensoren U bzw. v, die sich gemäß

aus der Polarzerlegung des Deformationsgradienten ergeben, siehe Bild. Darin ist R ein eigentlich orthogonaler Tensor mit den Eigenschaften RT · R = 1 und det(R) = +1 (1 ist der Einheitstensor.) Der rechte und linke Deformationstensor haben wegen

die Hauptstreckungen λ1,2,3 als Eigenwerte, denn sie sind ebenfalls einander ähnlich:

Weil der Deformationsgradient immer und überall invertierbar ist, sind dies die Strecktensoren auch.
Die dritte Invariante stellt gleichzeitig das Quadrat des Volumenverhältnisses
 dar:
dar:

Bei Inkompressibilität
im Werkstoffverhalten ( )
bleibt also die dritte Invariante der Strecktensoren gleich der Identität.
)
bleibt also die dritte Invariante der Strecktensoren gleich der Identität.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.12. 2020