Dynamisches Gleichgewicht (Technische Mechanik)
Als Dynamisches Gleichgewicht wird in der Technischen Mechanik das Gleichgewicht zwischen äußerer Kraft und Trägheitskraft bezeichnet.
Für einen Körper mit der Masse  lautet das zweite
Newtonsche Gesetz:
lautet das zweite
Newtonsche Gesetz:
 .
.
Dabei ist  die äußere Kraft und
die äußere Kraft und  die Beschleunigung im Inertialsystem.
Nachdem die Grundgleichung der Mechanik auf die Form
die Beschleunigung im Inertialsystem.
Nachdem die Grundgleichung der Mechanik auf die Form

gebracht wurde,
fasst man das negative Produkt aus Masse
und Beschleunigung
formal als Kraft auf, die als Trägheitskraft
oder genauer als D'Alembertsche Trägheitskraft  bezeichnet wird.
Man erhält:
bezeichnet wird.
Man erhält:

Damit ist das dynamische Problem auf ein statisches Problem des Kräftegleichgewichts zurückgeführt. Die Summe von äußerer Kraft und Trägheitskraft ist somit stets Null. Die d'Alembertsche Trägheitskraft ist die Folge der Beschleunigung und nicht deren Ursache.
Der Vorteil dieser Vorgehensweise liegt darin, dass die Beschreibung einheitlich in einem Inertialsystem erfolgt und nicht weitere Bezugssysteme eingeführt werden müssen. Für viele Anwendungen in der Technischen Mechanik ist bereits ein erdfestes Bezugssystem mit ausreichender Genauigkeit ein Inertialsystem. In der Fahrzeugdynamik nach DIN ISO 8855 so festgelegt.
Anwendung
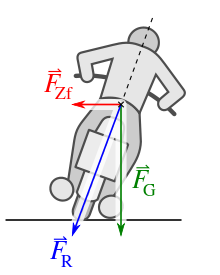
In der Praxis kann man den Umstand ausnutzen, dass Trägheitskraft und äußere Kraft häufig an verschiedenen Punkten angreifen. Beispiel ist die Berechnung der Schräglage eines Motorrads bei stationärer Kurvenfahrt. Als äußere Kräfte wirken die Gewichtskraft im Schwerpunkt und die Reifenkräfte im Radaufstandspunkt auf das Motorrad. Die Reifenkräfte sind die Seitenkraft radial zum Kurvenmittelpunkt sowie die Radlast vertikal (beide nicht eingezeichnet).
Der Betrag von Zentripetalkraft
bzw. Zentrifugalkraft berechnet sich aus der Bahngeschwindigkeit  und dem Krümmungsradius der Bahn
und dem Krümmungsradius der Bahn
 :
:

Wählt man als Bezugspunkt für das Momentengleichgewicht den
Radaufstandspunkt, muss die resultierende Kraft  aus Fliehkraft
aus Fliehkraft
 und Gewichtskraft
und Gewichtskraft  durch den Radaufstandspunkt gehen, wenn das Motorrad nicht umkippen soll. Die
Reifenkräfte, die die Zentripetalkraft
ausüben, brauchen beim Momentengleichgewicht nicht berücksichtigt zu werden, da
sie bezüglich des Bezugspunkts (Radaufstandspunkt) keinen Hebelarm
besitzen und dadurch kein Moment erzeugen. Für die Schräglage
durch den Radaufstandspunkt gehen, wenn das Motorrad nicht umkippen soll. Die
Reifenkräfte, die die Zentripetalkraft
ausüben, brauchen beim Momentengleichgewicht nicht berücksichtigt zu werden, da
sie bezüglich des Bezugspunkts (Radaufstandspunkt) keinen Hebelarm
besitzen und dadurch kein Moment erzeugen. Für die Schräglage  ergibt sich
ergibt sich

mit der Erdbeschleunigung
 ,
und der Radialbeschleunigung
,
und der Radialbeschleunigung
 .
.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.05. 2021