Langevin-Funktion
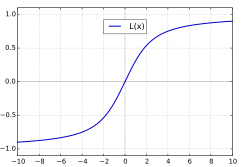
Die Langevin-Funktion  (nach dem Physiker Paul Langevin (1872–1946)) ist eine
mathematische Funktion, die zur Berechnung von Orientierungspolarisation,
Polarisation, Magnetisierung und Widerstand verwendet wird.
(nach dem Physiker Paul Langevin (1872–1946)) ist eine
mathematische Funktion, die zur Berechnung von Orientierungspolarisation,
Polarisation, Magnetisierung und Widerstand verwendet wird.
Definition
Die Langevin-Funktion[1] ist definiert durch
 ,
,
wobei  den Kotangens hyperbolicus bezeichnet.
den Kotangens hyperbolicus bezeichnet.
Eine Anwendung
Die bekannteste Anwendung ist die halbklassische Beschreibung eines Paramagneten in einem äußeren Magnetfeld. Dazu wird der Langevin-Parameter
 eingeführt:
eingeführt:

Die einzelnen Formelzeichen stehen für folgende Größen:
 : Magnetisches Moment
eines Teilchens
: Magnetisches Moment
eines Teilchens : Betrag der magnetischen Flussdichte des angelegten äußeren Magnetfeldes
: Betrag der magnetischen Flussdichte des angelegten äußeren Magnetfeldes : Boltzmann-Konstante
: Boltzmann-Konstante : Absolute Temperatur
: Absolute Temperatur
Für die Magnetisierung  eines Paramagneten ergibt sich dann:
eines Paramagneten ergibt sich dann:

 steht dabei für die Stoffmenge und für das magnetische Moment der
einzelnen Spins des Paramagneten. Eine weitere, quantenmechanische Beschreibung des Paramagnetismus ist durch die
Brillouin-Funktion gegeben.
steht dabei für die Stoffmenge und für das magnetische Moment der
einzelnen Spins des Paramagneten. Eine weitere, quantenmechanische Beschreibung des Paramagnetismus ist durch die
Brillouin-Funktion gegeben.
Reihenentwicklungen
Für alle reellen Werte x konvergent ist diese Summenreihe:

Beispielsweise gilt für die diskrete Cauchy-Verteilung jene Summenreihe:

Somit ist die unendliche Summe der Kehrwerte von den Nachfolgern der Quadratzahlen elementar.
Und folgender Grenzwert gilt:

Dieser Wert ist beim sogenannten Basler Problem die Lösung.
Die Maclaurinsche Reihe lautet wie folgt:

Der Konvergenzradius dieser Reihe ist die Kreiszahl π.
Und für das Quadrat der Langevin-Funktion gilt:

Der griechische Buchstabe Zeta stellt die Riemannsche Zetafunktion dar.
Eine Näherung[1] der Langevin-Funktion für
 ist
ist
 .
.
Für  gilt die Näherung[1]
gilt die Näherung[1]
 .
.
Umkehrfunktion
Da die Langevin-Funktion keine geschlossen darstellbare Umkehrfunktion hat, gibt es verschiedene Näherungen. Die invertierte Langevin-Funktion wird mit einer Minus-Eins von Spitzklammern umkleidet in Exponentenstellung hinter dem L dargestellt. Diese Umkehrfunktion ist ähnlich wie die Lambertsche W-Funktion nicht elementar darstellbar.
Eine verbreitete Näherung, die im Intervall
 gilt, wurde von A. Cohen veröffentlicht:[2]
gilt, wurde von A. Cohen veröffentlicht:[2]

Der größte relative Fehler dieser Näherung ist 4,9 % um
 . Es existieren weitere Näherungen,
die weitaus kleinere relative Fehler haben.[3][4]
. Es existieren weitere Näherungen,
die weitaus kleinere relative Fehler haben.[3][4]
Die Maclaurinsche Reihe der invertierten Langevin-Funktion lautet wie folgt[5] und hat den Konvergenzradius 1:

Siehe auch
Einzelnachweise
- ↑ Hochspringen nach: a b c Siegmund Brandt: Elektrodynamik. Springer, Berlin 2005, ISBN 3-540-21458-5, S. 293.
- ↑ A. Cohen: A Padé approximant to the inverse Langevin function. In:
Rheologica Acta. 30. Jahrgang, Nr. 3, 1991, S. 270–273,
doi:
 10.1007/BF00366640.
10.1007/BF00366640.
- ↑ R. Jedynak: New facts concerning the approximation of the inverse Langevin function. In:
Journal of Non-Newtonian Fluid Mechanics. 249. Jahrgang, 2017, S. 8–25,
doi: 10.1016/j.jnnfm.2017.09.003.
- ↑ M. Kröger: Simple, admissible, and accurate approximants of the inverse Langevin and Brillouin functions,
relevant for strong polymer deformations and flows. In: Journal of Non-Newtonian Fluid Mechanics. 223. Jahrgang, 2015, S. 77–87,
doi: 10.1016/j.jnnfm.2015.05.007.
- ↑ Laurence A. Belfiore: Physical Properties of Macromolecules. John Wiley & Sons, 2010, ISBN 0-470-55158-5, S. 277
( eingeschränkte Vorschau in der Google-Buchsuche)


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 04.01. 2026