Konvexe und konkave Funktionen
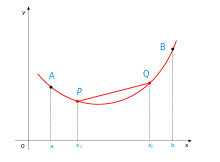
In der Analysis heißt eine reellwertige Funktion konvex (lateinisch: convexus = nach oben oder unten gewölbt), wenn ihr Graph unterhalb jeder Verbindungsstrecke zweier seiner Punkte liegt. Dies ist gleichbedeutend dazu, dass der Epigraph der Funktion, also die Menge der Punkte oberhalb des Graphen, eine konvexe Menge ist.
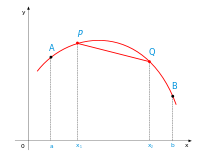
Eine reellwertige Funktion heißt konkav (lateinisch: concavus = gewölbt), wenn ihr Graph oberhalb jeder Verbindungsstrecke zweier seiner Punkte liegt. Dies ist gleichbedeutend dazu, dass der Hypograph der Funktion, also die Menge der Punkte unterhalb des Graphen, eine konvexe Menge ist.
Einer der ersten, der sich mit den Eigenschaften konvexer und konkaver Funktionen beschäftigte, war der dänische Mathematiker Johan Ludwig Jensen. Die nach ihm benannte Jensensche Ungleichung ist Grundlage wichtiger Resultate in der Wahrscheinlichkeitsrechnung, Maßtheorie und Analysis.
Die besondere Bedeutung konvexer bzw. konkaver Funktionen liegt darin, dass sie eine weitaus größere Gruppe als die linearen Funktionen bilden, aber ebenfalls viele einfach zu untersuchende Eigenschaften haben, welche Aussagen über nichtlineare Systeme ermöglichen. Da beispielsweise jedes lokale Minimum einer konvexen Funktionen auch ein globales Minimum ist, sind sie bei vielen Optimierungsproblemen von Bedeutung (siehe auch: Konvexe Optimierung). Selbst für konvexe Funktionale, die auf unendlichdimensionalen Räumen definiert sind, lassen sich unter bestimmten Voraussetzungen ähnliche Aussagen treffen. Daher spielt Konvexität auch eine wichtige Rolle in der Variationsrechnung.
Definition
.png)
Es gibt zwei äquivalente Definitionen, einerseits kann man Konvexität anhand einer Ungleichung über die Funktionswerte definieren (analytische Definition), andererseits über die Konvexität von Mengen (geometrische Definition).
Analytische Definition
Eine Funktion  ,
wobei
,
wobei  eine konvexe Teilmenge des
eine konvexe Teilmenge des  ist, heißt konvex, wenn für alle
ist, heißt konvex, wenn für alle  aus
aus  und für alle
und für alle ![{\displaystyle \theta \in [0,1]}](/svg/fead1e7dceab4be5ab2e91f5108144722daa8c36.svg) gilt, dass
gilt, dass

Hieraus lässt sich die Bedingung im Kopftext herleiten, dass der Graph der
Funktion  unterhalb der Verbindungsstrecke zweier seiner Punkte liegt.
unterhalb der Verbindungsstrecke zweier seiner Punkte liegt.
| Rechnerische Veranschaulichung der Herleitung |
|
Die nachfolgend beschriebenen geometrischen Objekte bebildern die
analytische Aussage und ermöglichen in den Fällen
Der Punkt Dazu sei
In der Schreibweise
Die Gerade
hierbei ist
Die ordinatenparallele Projektion des Punktes
hierbei ist
Da der Definitionsbereich
Die analytische Definition der Konvexität von verlangt, dass für die betrachteten |
 oder
oder  eine anschaulichen Vorstellung derselben.
eine anschaulichen Vorstellung derselben.  .
.
 sei die Koordinatendarstellung einer Abszisse
sei die Koordinatendarstellung einer Abszisse  die Koordinatendarstellung eines Punktes
die Koordinatendarstellung eines Punktes  mit Ordinate
mit Ordinate  .
.
 werden die Koordinaten der Abszisse durch den Punkt
werden die Koordinaten der Abszisse durch den Punkt  und
und  des Graphen von
des Graphen von  ;
; der allgemeine Punkt und
der allgemeine Punkt und  ein Richtungsvektor von
ein Richtungsvektor von  -fachen
von
-fachen
von  zeigt.
zeigt.  in den Abszissenraum
in den Abszissenraum  bezeichneter Punkt.
bezeichneter Punkt.  .
.
 durch die Punkte
durch die Punkte  ;
; der allgemeine Punkt und
der allgemeine Punkt und  ein Richtungsvektor von
ein Richtungsvektor von  zeigt.
zeigt.  des Graphen von
des Graphen von  ;
; durchläuft für wachsende
durchläuft für wachsende  projizierenden Punkte des Graphen von
projizierenden Punkte des Graphen von  bis
bis  ,
wie die Betrachtung der
,
wie die Betrachtung der  die Strecke von
die Strecke von 
 von
von  von
von  .
Dies war zu veranschaulichen.
.
Dies war zu veranschaulichen. Geometrische Definition
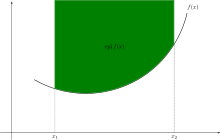
Eine Funktion  heißt konvex, wenn ihr Epigraph
eine konvexe Menge ist. Diese
Definition hat gewisse Vorteile für erweiterte
reelle Funktionen, welche auch die Werte
heißt konvex, wenn ihr Epigraph
eine konvexe Menge ist. Diese
Definition hat gewisse Vorteile für erweiterte
reelle Funktionen, welche auch die Werte  annehmen können, und bei denen mit der analytischen Definition der undefinierte
Term
annehmen können, und bei denen mit der analytischen Definition der undefinierte
Term  auftreten kann.
Aus der Konvexität des Epigraph ergibt sich außerdem, dass die Definitionsmenge
eine konvexe Menge ist. Eine konvexe Funktion hat also immer eine konvexe
Definitionsmenge, umgekehrt ist eine Funktion nicht konvex, wenn ihre
Definitionsmenge nicht konvex ist.
auftreten kann.
Aus der Konvexität des Epigraph ergibt sich außerdem, dass die Definitionsmenge
eine konvexe Menge ist. Eine konvexe Funktion hat also immer eine konvexe
Definitionsmenge, umgekehrt ist eine Funktion nicht konvex, wenn ihre
Definitionsmenge nicht konvex ist.
Konkave Funktionen
Ist  eine konvexe Funktion, so heißt
eine konvexe Funktion, so heißt  konkav. Für konkave Funktionen drehen sich die Definitionen jeweils um,
die analytische Definition einer konkaven Funktion lautet also
konkav. Für konkave Funktionen drehen sich die Definitionen jeweils um,
die analytische Definition einer konkaven Funktion lautet also
![{\displaystyle \forall x,y\in C,\ \theta \in [0,1]:\quad f(\theta x+(1-\theta )y)\geq \theta f(x)+(1-\theta )f(y),}](/svg/93e60e526141dc5f2ef785c2f802dfb5ce355182.svg)
die geometrische Definition einer konkaven Funktion fordert, dass der Hypograph eine konvexe Menge ist.
Weitere Klassifizierungen
Eine Funktion heißt streng konvex oder strikt konvex, wenn die
Ungleichung der analytischen Definition im strengen Sinn gilt; das heißt, für
alle Elemente  aus
und alle
aus
und alle  gilt, dass
gilt, dass
 .
.
Eine Funktion heißt stark konvex mit Parameter  bzw.
bzw.  -konvex,
wenn für alle
-konvex,
wenn für alle  und
gilt, dass
und
gilt, dass
 .
.
Stark konvexe Funktionen sind auch strikt konvex, die Umkehrung gilt jedoch nicht.
Des Weiteren gibt es den Begriff der gleichmäßig konvexen Funktion, welcher
das Konzept der starken Konvexität verallgemeinert. Eine Funktion heißt
gleichmäßig konvex mit Modulus ![{\displaystyle \phi :\mathbb {R} _{+}\to [0,\infty ]}](/svg/eb27adbdd25d8886f0de56260f38d10e38b1a2af.svg) ,
wobei
,
wobei  wachsend ist und nur bei 0 verschwindet, wenn für alle
und
gilt:
wachsend ist und nur bei 0 verschwindet, wenn für alle
und
gilt:
 .
.
Wählt man  mit ,
so erhält man die Ungleichung für starke Konvexität.
mit ,
so erhält man die Ungleichung für starke Konvexität.
Für die Begriffe strikt konvex, stark konvex und gleichmäßig konvex lassen sich die entsprechenden Gegenstücke strikt konkav, stark konkav und gleichmäßig konkav definieren, indem die jeweiligen Ungleichungen umgedreht werden.
Beispiele
- Lineare
Funktionen sind auf ganz
 konvex und konkav, jedoch nicht strikt.
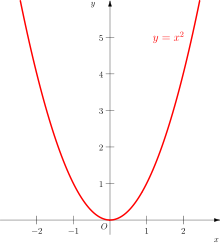
konvex und konkav, jedoch nicht strikt. - Die quadratische
Funktion
 ist streng konvex.
ist streng konvex. - Die Funktion
 ist streng konvex.
ist streng konvex. - Die Funktion
 ist nicht konvex, da die Definitionsmenge keine konvexe Menge ist.
ist nicht konvex, da die Definitionsmenge keine konvexe Menge ist. - Die Funktion
 ist streng konkav.
ist streng konkav. - Die Wurzelfunktion
ist im Intervall
 streng konkav.
streng konkav. - Die Betragsfunktion
 ist konvex, jedoch nicht streng konvex.
ist konvex, jedoch nicht streng konvex. - Die Exponentialfunktion
ist streng konvex auf ganz .
- Der natürliche Logarithmus ist streng konkav auf dem Intervall der positiven reellen Zahlen.
- Die kubische
Funktion
 ist streng konkav auf dem Intervall
ist streng konkav auf dem Intervall  und streng konvex auf dem Intervall
und streng konvex auf dem Intervall  .
. - Die Funktion, welche einen Punkt
 der euklidischen Ebene auf seinen Abstand vom Ursprung, abbildet, also
der euklidischen Ebene auf seinen Abstand vom Ursprung, abbildet, also
-
- ist ein Beispiel für eine konvexe Funktion auf einem mehrdimensionalen reellen Vektorraum.

Geschichte
Wesentliche Aussagen zu konvexen und konkaven Funktionen finden sich bereits 1889 bei Otto Hölder, wobei er aber noch nicht die heute üblichen Bezeichnungen verwendete. Die Begriffe konvexe und konkave Funktion wurden 1905 von Johan Ludwig Jensen eingeführt. Jensen verwendete allerdings eine schwächere Definition, die noch gelegentlich, vor allem in älteren Werken, zu finden ist. In dieser Definition wird nur die Ungleichung

vorausgesetzt. Wie Jensen aber zeigte, folgt daraus für stetige Funktionen die in der heute üblichen Definition verwendete Ungleichung

für alle  zwischen 0 und 1.
(siehe auch: Abschnitt
Konvexität und Stetigkeit)
zwischen 0 und 1.
(siehe auch: Abschnitt
Konvexität und Stetigkeit)
Reellwertige Funktion, welche der oben genannten schwächeren Ungleichung
( )
genügen, nennt man zu Ehren von Johan Ludwig Jensen Jensen-konvex oder
kurz J-konvex.
)
genügen, nennt man zu Ehren von Johan Ludwig Jensen Jensen-konvex oder
kurz J-konvex.
Elementare Eigenschaften
Verhältnis konvex und konkav
Die Funktion
ist genau dann (streng) konvex, wenn die Funktion
(streng) konkav ist. Eine nicht-konvexe Funktion muss jedoch nicht
notwendigerweise konkav sein. Konvexität und Konkavität sind somit keine komplementären
Eigenschaften.
Lineare Funktionen sind die einzigen Funktionen, die sowohl konkav als auch konvex sind.
- Beispiel
Die kubische
Funktion  ist auf ganz
betrachtet weder konvex noch konkav. Im Intervall aller positiven reellen Zahlen
ist
streng konvex. Die zu ihr additiv inverse Funktion
ist auf ganz
betrachtet weder konvex noch konkav. Im Intervall aller positiven reellen Zahlen
ist
streng konvex. Die zu ihr additiv inverse Funktion  ist dort somit streng konkav.
ist dort somit streng konkav.
Da
eine ungerade
Funktion ist, also  gilt, folgt daraus, dass sie im Bereich aller negativen Zahlen streng konkav
ist.
gilt, folgt daraus, dass sie im Bereich aller negativen Zahlen streng konkav
ist.
Niveaumengen
Bei einer konvexen Funktion sind alle Subniveaumengen, also Mengen der Form

konvex. Bei einer konkaven Funktion sind alle Superniveaumengen konvex.
Jensensche Ungleichung
Die Jensensche
Ungleichung ist eine Verallgemeinerung der analytischen Definition auf eine
endliche Anzahl von Stützstellen. Sie besagt, dass der Funktionswert einer
konvexen Funktion
an einer endlichen Konvexkombination
von Stützstellen kleiner
oder gleich der Konvexkombination von den Funktionswerten an den Stützstellen
ist. Für eine konvexe Funktion  und für nichtnegative
und für nichtnegative
 mit
mit  gilt also:
gilt also:

Für konkave Funktionen gilt die Ungleichung in umgekehrte Richtung.
Reduktion auf Konvexität reeller Funktionen
Der Urbildraum einer konvexen Funktion kann ein beliebiger reeller Vektorraum
sein, wie zum Beispiel der Vektorraum der reellen Matrizen oder der stetigen
Funktionen. Die Konvexität einer Funktion  ist aber äquivalent zur Konvexität der Funktion
ist aber äquivalent zur Konvexität der Funktion  definiert durch
definiert durch  für alle
für alle  ,
wobei
,
wobei  ist und
ist und  eine beliebige Richtung aus
eine beliebige Richtung aus  ist. Es ist dann
ist. Es ist dann  .
Dies macht es möglich, die Dimension des Vektorraumes zu verringern, was die
Überprüfung der Konvexität erleichtert.
.
Dies macht es möglich, die Dimension des Vektorraumes zu verringern, was die
Überprüfung der Konvexität erleichtert.
Ungleichungen
für  und
und 
Für
oder
drehen sich die Ungleichungen aus den Definitionen von (strikter) Konvexität
bzw. Konkavität um. Sei
beispielsweise eine auf
konvexe Funktion. Für Punkte  und
und  aus
gilt dann
aus
gilt dann

sofern auch der Punkt  im Definitionsbereich
liegt. Wenn
eine reelle konvexe Funktion ist, bedeutet die Ungleichung anschaulich, dass die
Funktionswerte von
außerhalb des Intervalls
im Definitionsbereich
liegt. Wenn
eine reelle konvexe Funktion ist, bedeutet die Ungleichung anschaulich, dass die
Funktionswerte von
außerhalb des Intervalls  stets oberhalb der Verbindungsgeraden
durch die Funktionswerte
stets oberhalb der Verbindungsgeraden
durch die Funktionswerte  liegen.
liegen.
Rechenregeln
Positivkombinationen
Die Summe zweier (gegebenenfalls erweiterter) konvexer Funktionen ist wieder eine konvexe Funktion. Außerdem bleibt Konvexität beim Multiplizieren mit einer positiven reellen Zahl erhalten. Zusammenfassend gilt also, dass jede Positivkombination von konvexen Funktionen wiederum konvex ist. Sie ist sogar streng konvex, falls einer der auftretenden Summanden streng konvex ist. Analog dazu ist auch jede Positivkombination von konkaven Funktionen konkav. Somit bilden die konvexen Funktionen einen konvexen Kegel. Das Produkt konvexer Funktionen ist jedoch nicht notwendigerweise konvex.
- Beispiel
Die Funktionen

sind konvex auf ganz ,
die Normparabel  ist sogar strikt konvex. Daraus folgt, dass auch alle Funktionen der Form
ist sogar strikt konvex. Daraus folgt, dass auch alle Funktionen der Form

mit  strikt konvex auf ganz
sind. Dies ist auch anschaulich klar, es handelt sich um nach oben gekrümmte
Parabeln. Das Produkt der Funktionen
strikt konvex auf ganz
sind. Dies ist auch anschaulich klar, es handelt sich um nach oben gekrümmte
Parabeln. Das Produkt der Funktionen  und
und  ist die kubische Funktion
ist die kubische Funktion  ,
welche (über ganz
betrachtet) nicht konvex ist.
,
welche (über ganz
betrachtet) nicht konvex ist.
Grenzfunktionen
Die Grenzfunktion einer punktweise konvergenten Folge konvexer Funktionen ist eine konvexe Funktion. Ebenso ist die Grenzfunktion einer punktweise konvergenten Reihe konvexer Funktionen wieder eine konvexe Funktion. Analoges gilt klarerweise für konkave Funktionen. Strikte Konvexität bleibt unter der Grenzwertbildung jedoch nicht notwendigerweise erhalten, wie man anhand des ersten der beiden folgenden Beispiele erkennt.
- Beispiele
- Die Funktionenfolge
 mit
mit  ist eine Folge von auf ganz
strikt konvexen Funktionen. Ihre punktweise Grenzfunktion ist die konstante Nullfunktion. Diese ist
als lineare Funktion zwar konvex, aber nicht strikt konvex.
ist eine Folge von auf ganz
strikt konvexen Funktionen. Ihre punktweise Grenzfunktion ist die konstante Nullfunktion. Diese ist
als lineare Funktion zwar konvex, aber nicht strikt konvex. - Der Cosinus
hyperbolicus lässt sich auf
folgendermaßen als Potenzreihe
entwickeln:

- Alle Summanden, die vorkommen, sind konvexe Funktionen. Daraus folgt, dass auch der Cosinus hyperbolicus eine konvexe Funktion ist.
Supremum und Infimum
Ist  eine Menge konvexer Funktionen und existiert punktweise das Supremum
eine Menge konvexer Funktionen und existiert punktweise das Supremum

für alle ,
so ist auch
eine konvexe Funktion. Der Übergang zur Funktion
zeigt, dass das Infimum
einer Menge konkaver Funktionen (falls es existiert) ebenfalls wieder eine
konkave Funktion ist. Das Bilden des Infimums erhält jedoch nicht
notwendigerweise Konvexität (und umgekehrt erhält das Bilden des Supremums nicht
notwendigerweise Konkavität), wie das folgende Beispiel zeigt.
- Beispiel
Die reellen Funktionen

sind linear und deshalb sowohl konvex als auch konkav. Das Supremum von
und
ist die Betragsfunktion
 .
Diese ist zwar konvex, jedoch nicht konkav. Das Infimum von
und
ist die negative Betragsfunktion
.
Diese ist zwar konvex, jedoch nicht konkav. Das Infimum von
und
ist die negative Betragsfunktion  .
Diese ist konkav, aber nicht konvex.
.
Diese ist konkav, aber nicht konvex.
Komposition
Über die Komposition
 zweier konvexer Funktionen
und
zweier konvexer Funktionen
und  lässt sich im Allgemeinen keine Aussage treffen. Gilt jedoch zusätzlich, dass
monoton
steigend ist, so ist die Komposition ebenfalls konvex.
lässt sich im Allgemeinen keine Aussage treffen. Gilt jedoch zusätzlich, dass
monoton
steigend ist, so ist die Komposition ebenfalls konvex.
Des Weiteren ist die Komposition
einer konkaven Funktion
mit einer konvexen, monoton
fallenden reellen Funktion
wiederum eine konvexe Funktion.
- Beispiel
Jede Komposition einer konvexen Funktion
mit der Exponentialfunktion  liefert wieder eine konvexe Funktion. Dies funktioniert auch im allgemeinen
Fall, in dem
auf einem reellen Vektorraum definiert ist. So ist beispielsweise für
liefert wieder eine konvexe Funktion. Dies funktioniert auch im allgemeinen
Fall, in dem
auf einem reellen Vektorraum definiert ist. So ist beispielsweise für

wiederum eine konvexe Funktion. Insbesondere ist also jede logarithmisch konvexe Funktion eine konvexe Funktion.
Umkehrfunktionen
Ist
eine auf einem Intervall definierte, invertierbare und konvexe Funktion, so
folgt aus der Konvexitätsungleichung

Sei
eine monoton
steigende Funktion. Dann dreht sich obige Ungleichung beim Anwenden von
 um. Es gilt somit:
um. Es gilt somit:

Also ist die Umkehrfunktion
eine konkave (und monoton wachsende) Funktion. Für eine invertierbare, monoton
steigende und konvexe bzw. konkave Funktion hat daher die Umkehrfunktion die
umgekehrte Art der Konvexität.
Für eine monoton
fallende und konvexe Funktion
gilt hingegen

Für eine invertierbare monoton fallende und konvexe bzw. konkave Funktion hat daher die Umkehrfunktion die gleiche Art der Konvexität.
- Beispiele
- Die Normparabel
ist monoton steigend und streng konvex auf .
Ihre Umkehrfunktion, die Wurzelfunktion
 ist streng konkav auf ihrem Definitionsintervall
ist streng konkav auf ihrem Definitionsintervall - Die Funktion
 ist monoton fallend und streng konvex auf ganz .
Ihre Umkehrfunktion
ist monoton fallend und streng konvex auf ganz .
Ihre Umkehrfunktion  ist streng konvex auf dem Intervall
ist streng konvex auf dem Intervall
Extremwerte
 >
hat kein globales Minimum
>
hat kein globales MinimumWenn der Ausgangsraum einer konvexen/konkaven Funktion ein topologischer
Vektorraum ist (was insbesondere auf alle endlichdimensionalen reellen
Vektorräume und somit auch auf
zutrifft), können Aussagen über das Verhältnis von lokalen und globalen
Extremalstellen getroffen werden. Es gilt dann, dass jede lokale Extremalstelle
auch eine globale Extremalstelle ist. Strikte Konvexität bzw. Konkavität erlaubt
außerdem Aussagen über die Eindeutigkeit von Extremwerten.
Existenz und Eindeutigkeit
Eine stetige konvexe oder konkave Funktion  nimmt auf der kompakten Menge
ein Minimum und ein Maximum an. Die Kompaktheit von
ist auf
äquivalent dazu, dass
beschränkt und abgeschlossen ist. Dies ist der Satz vom
Minimum und Maximum angewendet auf konvexe und konkave Funktionen. Ist die
Funktion strikt konvex, so ist das Minimum eindeutig bestimmt, ist sie strikt
konkav, so ist das Maximum eindeutig bestimmt. Der Umkehrschluss gilt jedoch
nicht: die Funktion
hat kein globales Minimum in ,
ist aber strikt konvex.
nimmt auf der kompakten Menge
ein Minimum und ein Maximum an. Die Kompaktheit von
ist auf
äquivalent dazu, dass
beschränkt und abgeschlossen ist. Dies ist der Satz vom
Minimum und Maximum angewendet auf konvexe und konkave Funktionen. Ist die
Funktion strikt konvex, so ist das Minimum eindeutig bestimmt, ist sie strikt
konkav, so ist das Maximum eindeutig bestimmt. Der Umkehrschluss gilt jedoch
nicht: die Funktion
hat kein globales Minimum in ,
ist aber strikt konvex.
Für eine stetige Funktion  auf einem reflexiven
Banachraum gibt es analoge
Aussagen: Ein stetiges konvexes Funktional auf der kompakten Menge
nimmt dort ein Minimum an. Ist das Funktional strikt konvex, so ist das Minimum
eindeutig.
auf einem reflexiven
Banachraum gibt es analoge
Aussagen: Ein stetiges konvexes Funktional auf der kompakten Menge
nimmt dort ein Minimum an. Ist das Funktional strikt konvex, so ist das Minimum
eindeutig.
Geometrie der Optimalwertmengen
In topologischen Vektorräumen (welche fast immer gegeben sind) kann man auch lokale Minima untersuchen. Es gilt:
- Ist die Funktion konvex, so ist jedes lokale Minimum auch ein globales Minimum.
- Ist die Funktion konkav, so ist jedes lokale Maximum auch ein globales Maximum.
Dies lässt sich direkt mit den definierenden Ungleichungen von konvexen und konkaven Funktionen zeigen.
Außerdem ist die Menge der Minimalstellen einer konvexen Funktion konvex und die Menge der Maximalstellen einer konkaven Funktion konvex. Dies folgt aus der Konvexität der Subniveaumengen bzw. Superniveaumengen.
Kriterien für Extremwerte
Für differenzierbare konvexe Funktionen nutzt man zur Bestimmung der
Extremalwerte aus, dass konvexe Funktionen in jedem Punkt von der Tangente an
diesem Punkt global unterschätzt werden. Es gilt  ,
wobei
,
wobei  das Standardskalarprodukt
bezeichnet. Ist nun der Gradient in einem Punkt
das Standardskalarprodukt
bezeichnet. Ist nun der Gradient in einem Punkt  gleich null, so ist
gleich null, so ist  für alle
für alle  und damit ist
ein lokales (und damit globales) Minimum. Analog liegt bei konkaven Funktionen
in einem Punkt immer ein lokales (und damit globales) Maximum vor, wenn der
Gradient bzw. die Ableitung an diesem Punkt verschwindet.
und damit ist
ein lokales (und damit globales) Minimum. Analog liegt bei konkaven Funktionen
in einem Punkt immer ein lokales (und damit globales) Maximum vor, wenn der
Gradient bzw. die Ableitung an diesem Punkt verschwindet.
Konvexität und Stetigkeit
Setzt man die Stetigkeit einer reellen Funktion
voraus, so reicht, um ihre Konvexität zu zeigen, bereits die Bedingung, dass für
alle
aus dem Definitionsintervall folgende Ungleichung gilt:

Dies entspricht der Konvexitätsdefinition nach Jensen. Umgekehrt gilt, dass
jede auf einem Intervall definierte Funktion, die die obige Ungleichung erfüllt,
in den inneren Punkten stetig
ist. Unstetigkeitsstellen
können höchstens in Randpunkten auftreten, wie das Beispiel der Funktion  mit
mit

zeigt, die zwar konvex ist, aber am Randpunkt  eine Unstetigkeit aufweist.
eine Unstetigkeit aufweist.
Somit sind die beiden Möglichkeiten, Konvexität zu definieren, zumindest für offene Intervalle äquivalent. Inwiefern dieses Resultat auf allgemeine topologische Räume übertragen werden kann, wird in den beiden folgenden Abschnitten behandelt.
In diesem Zusammenhang ist der Satz von Bernstein-Doetsch zu erwähnen, aus dem allgemein das folgende Resultat zu gewinnen ist:
- Ist
 eine reellwertige Funktion für eine konvexe offene Teilmenge
eine reellwertige Funktion für eine konvexe offene Teilmenge  des
des  ,
so ist
sowohl Jensen-konvex als auch stetig genau dann, wenn für je zwei Punkte
,
so ist
sowohl Jensen-konvex als auch stetig genau dann, wenn für je zwei Punkte  und jede reelle
Zahl
und jede reelle
Zahl ![t\in [0,1]](/svg/31a5c18739ff04858eecc8fec2f53912c348e0e5.svg) stets die Ungleichung
stets die Ungleichung
- erfüllt ist.

Eine schwächere Definition der Konvexität
Eine stetige Funktion
auf einer konvexen Teilmenge
eines reellen topologischen
Vektorraums ist konvex, wenn ein festes  mit
mit  existiert, sodass für alle ,
aus
gilt:
existiert, sodass für alle ,
aus
gilt:

Dass in dieser schwächeren Definition von Konvexität Stetigkeit benötigt wird, lässt sich anhand des folgenden Gegenbeispiels erkennen.
- Gegenbeispiel
Sei  eine Hamelbasis
des Vektorraums der reellen Zahlen über dem Körper der rationalen Zahlen, also
eine über den rationalen Zahlen linear unabhängige Menge reeller Zahlen, in der
jede reelle Zahl
eine Hamelbasis
des Vektorraums der reellen Zahlen über dem Körper der rationalen Zahlen, also
eine über den rationalen Zahlen linear unabhängige Menge reeller Zahlen, in der
jede reelle Zahl  eine eindeutige Darstellung der Art
eine eindeutige Darstellung der Art  mit nur endlich vielen rationalen
mit nur endlich vielen rationalen  hat. Dann erfüllt bei beliebiger Wahl von
hat. Dann erfüllt bei beliebiger Wahl von  die Funktion
die Funktion  zwar
zwar  ist aber nicht notwendigerweise konvex.
ist aber nicht notwendigerweise konvex.
Beschränktheit und Stetigkeit in normierten Räumen
Setzt man für eine Funktion
zusätzlich zur Bedingung, dass für ein fixes  die Beziehung
die Beziehung

für alle ,
aus einer konvexen Teilmenge
eines normierten
Vektorraums gilt, noch voraus, dass
nach oben beschränkt
ist, so folgt daraus bereits die Stetigkeit von
in den inneren
Punkten von .
Anschaulich wird dies daraus klar, dass man an einer Unstetigkeitsstelle
eine beliebig steile Verbindungsgerade zwischen zwei Funktionswerten ziehen
kann, wobei die Funktion zwischen den beiden Werten unterhalb der
Verbindungsgeraden und außerhalb der beiden Werte oberhalb der Verbindungsgerade
liegen muss. Kann die Verbindungsgerade nun beliebig steil werden, so stößt man
irgendwann über die obere Schranke der Funktion.
Die Aussage, dass eine konvexe beschränkte Funktion stetig in den inneren Punkten ist, ist auch bedeutsam für das Lösen der -->cauchyschen Funktionalgleichung


Aus dieser Aussage folgt nämlich, dass diese Funktionalgleichung eine
eindeutige Lösung hat, wenn zusätzlich gefordert wird, dass
beschränkt ist.
In endlichdimensionalen Räumen
Konvexe Funktionen ,
die auf einer Teilmenge
eines endlichdimensionalen reellen Vektorraums
definiert sind, sind stetig in den inneren Punkten. Um das zu sehen, betrachte
man einen inneren Punkt  .
Für diesen existiert ein Simplex
.
Für diesen existiert ein Simplex
 mit den Eckpunkten
mit den Eckpunkten  ,
der
,
der  wieder als inneren Punkt enthält. Jeder Punkt
wieder als inneren Punkt enthält. Jeder Punkt  ist aber in der Form
ist aber in der Form
 mit
mit 
und  für alle
für alle  darstellbar. Nach der jensenschen
Ungleichung gilt nun
darstellbar. Nach der jensenschen
Ungleichung gilt nun
 .
.
ist daher nach oben beschränkt
auf  und somit, wie oben gezeigt wurde, stetig im inneren Punkt .
und somit, wie oben gezeigt wurde, stetig im inneren Punkt .
In unendlichdimensionalen Räumen
Im unendlichdimensionalen Fall sind konvexe Funktionen nicht notwendigerweise stetig, da es insbesondere lineare (und somit auch konvexe) Funktionale gibt, die nicht stetig sind.
Konvexität und Differenzierbarkeit
Konvexität und erste Ableitung
Eine auf einem offenen Intervall definierte, konvexe bzw. konkave Funktion ist lokal Lipschitz-stetig und somit nach dem Satz von Rademacher fast überall differenzierbar. Sie ist in jedem Punkt links- und rechtsseitig differenzierbar.
Die Ableitung als Konvexitätskriterium
Die erste Ableitung lässt sich auf zweierlei Arten als Konvexitätskriterium
verwenden. Eine stetig differenzierbare reelle Funktion  ist
ist
- genau dann konvex auf ,
wenn ihre Ableitung dort monoton
wachsend ist.
- genau dann streng konvex auf ,
wenn ihre Ableitung dort streng
monoton wachsend ist.
- genau dann konkav auf ,
wenn ihre Ableitung dort monoton fallend ist.
- genau dann streng konkav auf ,
wenn ihre Ableitung dort streng monoton fallend ist.
Dieses Resultat findet sich im Wesentlichen schon 1889 bei Otto Hölder.
Mit dem erweiterten Monotoniebegriff
für vektorwertige Funktionen lässt sich dies auch für Funktionen
erweitern. Dann ist
genau dann (strikt/gleichmäßig) konvex, wenn  (strikt/gleichmäßig) monoton ist.
(strikt/gleichmäßig) monoton ist.
Alternativ ist eine differenzierbare Funktion
genau dann
- konvex, wenn
 ist für alle .
ist für alle . - strikt konvex, wenn
 ist für alle
ist für alle  .
. - konkav, wenn
 ist für alle .
ist für alle . - strikt konkav, wenn
 ist für alle .
ist für alle .
Im Falle einer Funktion
vereinfacht sich  zu
zu  .
.
Beispiel
Betrachtet man als Beispiel den Logarithmus
 .
Er ist auf dem Intervall
stetig differenzierbar mit Ableitung
.
Er ist auf dem Intervall
stetig differenzierbar mit Ableitung  .
.
Nach dem ersten Konvexitätskriterium muss jetzt die Ableitung auf Monotonie
untersucht werden. Ist  und
und  ,
so ist
,
so ist  ,
da Zähler und Nenner echt positiv sind. Somit ist
,
da Zähler und Nenner echt positiv sind. Somit ist  streng monoton fallend und folglich ist
streng konkav auf .
streng monoton fallend und folglich ist
streng konkav auf .
Nach dem zweiten Monotoniekriterium überprüft man für
 .
.
Da aber  für
für  ist, gilt die Ungleichung, wenn
ist, gilt die Ungleichung, wenn  ist und
ist und  sind. Also ist der Logarithmus streng konkav auf .
sind. Also ist der Logarithmus streng konkav auf .
Betrachtet man die Funktion
 ,
,
so sind alle partiellen Ableitungen stetig und für den Gradient gilt

Zur Überprüfung des ersten Konvexitätskriteriums bildet man für
 ,
,
da die quadratischen Terme immer echt positiv sind, die Positivität der Terme
mit  folgt aus der Monotonie der e-Funktion. Somit ist die Funktion strikt monoton,
also auch strikt konvex.
folgt aus der Monotonie der e-Funktion. Somit ist die Funktion strikt monoton,
also auch strikt konvex.
Tangenten
Die Graphen differenzierbarer konvexer Funktionen liegen oberhalb jeder ihrer Tangenten. Analog dazu liegen konkave Funktionen stets unterhalb ihrer Tangenten. Dies folgt direkt aus dem zweiten Konvexitätskriterium. Dieses lässt sich auch so interpretieren, dass die Taylor-Entwicklung ersten Grades eine konvexe Funktion stets global unterschätzt. Aus diesen Eigenschaften folgt beispielsweise die Verallgemeinerung der bernoullischen Ungleichung:
 für
für  oder
oder 
 für
für  .
.
Konvexität und zweite Ableitung
Konvexitätskriterien und zweimalige Differenzierbarkeit
Für eine zweimal differenzierbare Funktion
lassen sich weitere Aussagen treffen.
ist genau dann konvex, wenn ihre zweite Ableitung nicht negativ ist. Ist  durchweg positiv,
also stets linksgekrümmt,
dann folgt daraus, dass
streng konvex ist. Analog dazu ist
genau dann konkav, wenn
durchweg positiv,
also stets linksgekrümmt,
dann folgt daraus, dass
streng konvex ist. Analog dazu ist
genau dann konkav, wenn  gilt. Ist
durchweg negativ,
also stets rechtsgekrümmt, so ist
streng konkav.
gilt. Ist
durchweg negativ,
also stets rechtsgekrümmt, so ist
streng konkav.
Ist die mehrdimensionale Funktion  zweimal
stetig differenzierbar, dann gilt, dass
genau dann konvex ist, wenn die Hesse-Matrix
von
positiv
semidefinit ist. Ist die Hesse-Matrix von
positiv
definit, so ist
strikt konvex. Umgekehrt ist
genau dann konkav, wenn die Hesse-Matrix von
negativ
semidefinit ist. Ist die Hesse-Matrix von
negativ
definit, so ist
strikt konkav.
zweimal
stetig differenzierbar, dann gilt, dass
genau dann konvex ist, wenn die Hesse-Matrix
von
positiv
semidefinit ist. Ist die Hesse-Matrix von
positiv
definit, so ist
strikt konvex. Umgekehrt ist
genau dann konkav, wenn die Hesse-Matrix von
negativ
semidefinit ist. Ist die Hesse-Matrix von
negativ
definit, so ist
strikt konkav.
Im Kern basieren die Konvexitätskriterien zweiter Ordnung auf der Überprüfung der Monotonie der Ableitung durch Monotoniekriterien, die wiederum auf Differenzierbarkeit basieren.
Beispiele
Die Funktion  mit
mit  ist konvex, da
ist konvex, da  für alle .
Sie ist sogar streng konvex, was beweist, dass strenge Konvexität nicht
impliziert, dass die zweite Ableitung positiv ist (
hat bei 0 eine Nullstelle).
für alle .
Sie ist sogar streng konvex, was beweist, dass strenge Konvexität nicht
impliziert, dass die zweite Ableitung positiv ist (
hat bei 0 eine Nullstelle).
Die oben betrachtete Funktion
ist zweimal stetig differenzierbar auf  mit zweiter Ableitung
mit zweiter Ableitung  für alle
für alle  .
Also ist die Funktion streng konkav.
.
Also ist die Funktion streng konkav.
Betrachtet man die Funktion
- ,
so ist ihre Hesse-Matrix
 .
.
Sie ist positiv definit, da alle ihre Eigenwerte echt positiv sind.
Also ist
strikt konvex.
Konvexe Funktionen in der Geometrie
Eine nicht-leere, abgeschlossene Teilmenge  eines reellen normierten Vektorraums
ist genau dann konvex, wenn die durch
eines reellen normierten Vektorraums
ist genau dann konvex, wenn die durch

definierte Abstandsfunktion eine konvexe Funktion  ist.
ist.
Dieselbe Eigenschaft gilt nicht nur für Teilmengen des ,
sondern auch allgemein für Teilmengen von CAT(0)-Räumen,
insbesondere von Riemannschen
Mannigfaltigkeit nichtpositiver Schnittkrümmung.
Die Konvexität der Abstandsfunktion ist ein wichtiges Hilfsmittel bei der
Untersuchung nichtpositiv gekrümmter Räume.
Verallgemeinerungen
Für reellwertige Funktionen
- Eine quasikonvexe Funktion verallgemeinert die Eigenschaft einer konvexen Funktion, dass ihre Subniveaumengen, also Mengen der Form
 ,
,
- konvex sind. Eine Funktion ist quasikonvex, wenn jede Subniveaumenge konvex ist. Jede konvexe Funktion ist quasikonvex, die Umkehrung gilt nicht.
- Eine pseudokonvexe
Funktion ist eine differenzierbare
Funktion, für die gilt: Wenn
 gilt, so folgt
gilt, so folgt  .
Diese Funktionen verallgemeinern die Eigenschaft konvexer Funktionen, dass an
einer Stelle mit verschwindendem Gradienten ein globales Minimum vorliegt.
Jede differenzierbare konvexe Funktion ist pseudokonvex.
.
Diese Funktionen verallgemeinern die Eigenschaft konvexer Funktionen, dass an
einer Stelle mit verschwindendem Gradienten ein globales Minimum vorliegt.
Jede differenzierbare konvexe Funktion ist pseudokonvex. - Logarithmische
Konvexität einer Funktion
liegt vor, wenn
 konvex ist. Streng genommen sind logarithmisch konvexe Funktionen keine
Verallgemeinerung, sondern ein Spezialfall von konvexen Funktionen.
konvex ist. Streng genommen sind logarithmisch konvexe Funktionen keine
Verallgemeinerung, sondern ein Spezialfall von konvexen Funktionen.
Für Funktionen in endlichdimensionalen Vektorräumen
- K-konvexe
Funktionen verallgemeinern konvexität von Funktionen, die nach
abbilden, auf den Fall, dass die Funktion in den
abbildet, also vektorwertig ist. Dies geschieht mittels verallgemeinerter
Ungleichungen.
- Ein Spezialfall von K-konvexen Funktionen sind die Matrix-konvexen Funktionen. Sie bilden in den Raum der reellen symmetrischen Matrizen, versehen mit der Loewner-Halbordnung, ab.
Für Abbildungen in allgemeinen reellen Vektorräumen
- Die fast konvexen Funktionen verallgemeinern die Konvexität so, dass für sie möglichst gute Regularitätsvoraussetzungen in der Optimierung gelten.
- Eine konvexe
Abbildung ist eine Abbildung
 zwischen zwei reellen Vektorräumen, für die
zwischen zwei reellen Vektorräumen, für die

- für alle
![\lambda \in [0,1]](/svg/010c0ee88963a09590dd07393d288edd83786b91.svg) und
aus der konvexen Menge
und
aus der konvexen Menge  gilt. Hierbei ist
gilt. Hierbei ist  ein Ordnungskegel
auf
ein Ordnungskegel
auf  .
.
Literatur
- Peter Kosmol: Optimierung und Approximation (= De Gruyter Studium). 2. Auflage. Walter de Gruyter & Co., Berlin 2010, ISBN 978-3-11-021814-5.
- Kurt Leichtweiß: Konvexe Mengen (= Hochschultext). Springer-Verlag, Berlin, Heidelberg, New York 1980, ISBN 3-540-09071-1.
- Jürg T. Marti: Konvexe Analysis (= Lehrbücher und Monographien aus dem Gebiet der Exakten Wissenschaften, Mathematische Reihe. Band 54). Birkhäuser Verlag, Basel, Stuttgart 1977, ISBN 3-7643-0839-7.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 21.12. 2021