Dyadisches Produkt
Das dyadische Produkt (kurz auch Dyade von griech. δύας, dýas „Zweiheit“) oder tensorielle Produkt ist in der Mathematik ein spezielles Produkt zweier Vektoren. Das Ergebnis eines dyadischen Produkts ist eine Matrix (oder ein Tensor zweiter Stufe) mit dem Rang eins. Das dyadische Produkt kann als Spezialfall eines Matrizenprodukts einer einspaltigen Matrix mit einer einzeiligen Matrix angesehen werden; es entspricht dann dem Kronecker-Produkt dieser beiden Matrizen. Um den Gegensatz zum inneren Produkt (Skalarprodukt) zu betonen, wird das dyadische Produkt gelegentlich auch äußeres Produkt genannt, wobei diese Bezeichnung aber nicht eindeutig ist, da sie auch für das Kreuzprodukt und das Dachprodukt verwendet wird.
Das Konzept des dyadischen Produkts geht auf den US-amerikanischen Physiker Josiah Willard Gibbs zurück, der es erstmals im Jahr 1881 im Rahmen seiner Vektoranalysis formulierte.
Definition
Das dyadische Produkt ist eine Verknüpfung
zweier reeller Vektoren  und
und  der Form
der Form
 ,
,
wobei das Ergebnis eine Matrix
 ist. Jeder Eintrag
ist. Jeder Eintrag  der Ergebnismatrix berechnet sich dabei aus den Vektoren
der Ergebnismatrix berechnet sich dabei aus den Vektoren  und
und  über
über

als das Produkt
der Elemente  und
und  .
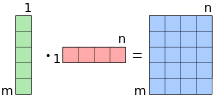
Interpretiert man den ersten Vektor als einspaltige Matrix und den zweiten
Vektor als einzeilige Matrix, so lässt sich das dyadische Produkt mittels
.
Interpretiert man den ersten Vektor als einspaltige Matrix und den zweiten
Vektor als einzeilige Matrix, so lässt sich das dyadische Produkt mittels

als Matrizenprodukt
darstellen, wobei  der zu
der zu  transponierte
Vektor ist. Das dyadische Produkt kann so auch als Spezialfall des Kronecker-Produkts
einer einspaltigen mit einer einzeiligen Matrix angesehen werden.
transponierte
Vektor ist. Das dyadische Produkt kann so auch als Spezialfall des Kronecker-Produkts
einer einspaltigen mit einer einzeiligen Matrix angesehen werden.
Beispiele
Sind  und
und  ,
dann ist das dyadische Produkt von
,
dann ist das dyadische Produkt von  und
und

Jede Spalte dieser Matrix ist also ein Vielfaches
von
und jede Zeile ein Vielfaches von .
Als triviale
Beispiele sind jede Nullmatrix
das dyadische Produkt von Nullvektoren
und jede Einsmatrix das dyadische
Produkt von Einsvektoren
entsprechend passender Größe:
 und
und 
Eigenschaften
Die folgenden Eigenschaften des dyadischen Produkts ergeben sich direkt aus den Eigenschaften der Matrizenmultiplikation.
Kommutativität
Das dyadische Produkt ist, wie zahlreiche Beispiele belegen, nicht kommutativ.
Für die Transponierte des dyadischen Produkts zweier Vektoren
und
gilt
 .
.
Zwei Vektoren
und
sind damit genau dann vertauschbar, das heißt, es gilt
 ,
,
wenn die Ergebnismatrix symmetrisch
ist. Dies ist genau dann der Fall, wenn einer der beiden Vektoren ein Vielfaches
des anderen Vektors ist, das heißt, wenn es eine Zahl  gibt, sodass
gibt, sodass  oder
oder  gilt. Ist einer der Vektoren ein Nullvektor, dann gilt insbesondere für alle
gilt. Ist einer der Vektoren ein Nullvektor, dann gilt insbesondere für alle

 ,
,
wobei die Ergebnismatrix dann die Nullmatrix ist.
Distributivität
Mit der Vektoraddition
 ist das dyadische Produkt distributiv,
das heißt, es gilt für alle
und
ist das dyadische Produkt distributiv,
das heißt, es gilt für alle
und 

sowie für alle  und
und  entsprechend
entsprechend
 .
.
Weiter ist das dyadische Produkt verträglich mit der Skalarmultiplikation,
das heißt für
und
sowie
gilt
 .
.
Dyadisches Produkt zweier Vektoren
Das dyadische Produkt zweier Vektoren
und
ergibt, sofern keiner der beiden Vektoren der Nullvektor ist, eine Rang-Eins-Matrix, das
heißt
 .
.
Umgekehrt lässt sich jede Rang-Eins-Matrix als dyadisches Produkt zweier Vektoren darstellen. Für die Spektralnorm und die Frobeniusnorm eines dyadischen Produkts gilt
 ,
,
wobei  die euklidische
Norm des Vektors
ist. Neben der Nullmatrix sind Rang-Eins-Matrizen die einzigen Matrizen, für die
diese beiden Normen übereinstimmen.
die euklidische
Norm des Vektors
ist. Neben der Nullmatrix sind Rang-Eins-Matrizen die einzigen Matrizen, für die
diese beiden Normen übereinstimmen.
Bezüge zu anderen Produkten
Skalarprodukt
Bildet man umgekehrt das Produkt aus einem Zeilenvektor mit einem
Spaltenvektor, so erhält man das Standardskalarprodukt
zweier Vektoren  gegeben durch
gegeben durch
 ,
,
wobei das Ergebnis eine reelle Zahl ist. Das Standardskalarprodukt zweier Vektoren ist gleich der Spur (der Summe der Diagonalelemente) ihres dyadischen Produkts, also
 .
.
Weiter ist die Matrix  genau dann nilpotent
(immer vom Grad 2), wenn die beiden Vektoren orthogonal
sind, das heißt
genau dann nilpotent
(immer vom Grad 2), wenn die beiden Vektoren orthogonal
sind, das heißt
 .
.
Wenn sich Zeilen- und Spaltenvektoren passender Größe abwechseln, können auch mehrere Vektoren miteinander multipliziert werden. Aufgrund der Assoziativität der Matrizenmultiplikation erhält man so die Identitäten

und
 .
.
Ein Skalarprodukt
wird auch inneres Produkt genannt, weswegen das dyadische Produkt gelegentlich
auch als äußeres Produkt bezeichnet wird. Diese Dualität wird in der Bra-Ket-Notation der Quantenmechanik
genutzt, wo ein inneres Produkt durch  und ein äußeres Produkt durch
und ein äußeres Produkt durch  notiert wird.
notiert wird.
Tensorprodukt
Der Vektorraum, der durch
dyadische Produkte von Vektoren  aufgespannt wird,
ist der Tensorproduktraum
aufgespannt wird,
ist der Tensorproduktraum
 .
.
Dieser Raum ist isomorph
zum Raum aller Matrizen  .
Jede Matrix
.
Jede Matrix  lässt sich demnach als Linearkombination
dyadischer Produkte von Vektoren darstellen, das heißt
lässt sich demnach als Linearkombination
dyadischer Produkte von Vektoren darstellen, das heißt
 ,
,
wobei  ,
,
 und
und  sind. Durch eine geeignete Wahl von Vektoren
sind. Durch eine geeignete Wahl von Vektoren  und einer Rangschranke
und einer Rangschranke  lässt sich auf diese Weise auch eine Niedrigrang-Approximation
einer Matrix erreichen, wodurch numerische
Berechnungen bei sehr großen Matrizen beschleunigt werden können.
lässt sich auf diese Weise auch eine Niedrigrang-Approximation
einer Matrix erreichen, wodurch numerische
Berechnungen bei sehr großen Matrizen beschleunigt werden können.
Verwendung
In vielen Anwendungen wird ein dyadisches Produkt nicht komponentenweise
ausgerechnet, sondern zunächst stehen gelassen und erst ausgewertet, wenn es mit
weiteren Termen multipliziert wird. Multipliziert man das dyadische Produkt
mit einem Vektor  ,
erhält man einen Vektor, der parallel
zu
ist, da
,
erhält man einen Vektor, der parallel
zu
ist, da

gilt. Das dyadische Produkt eines Einheitsvektors
 mit sich selbst ist ein Projektionsoperator,
denn das Matrix-Vektor-Produkt
mit sich selbst ist ein Projektionsoperator,
denn das Matrix-Vektor-Produkt

projiziert einen gegebenen Vektor
orthogonal auf eine Ursprungsgerade
mit Richtungsvektor
.
Die Spiegelung
eines Vektors an einer Ursprungsebene
mit Einheits-Normalenvektor
 ergibt sich entsprechend als
ergibt sich entsprechend als
 ,
,
wobei  die Einheitsmatrix
ist. Solche Spiegelungen werden beispielsweise in der Householdertransformation
verwendet.
die Einheitsmatrix
ist. Solche Spiegelungen werden beispielsweise in der Householdertransformation
verwendet.
Koordinatenfreie Darstellung
In einer abstrakteren, koordinatenfreien Darstellung ist das dyadische
Produkt  zweier Vektoren
zweier Vektoren  und
und  aus zwei Vektorräumen
aus zwei Vektorräumen  und
und  ein Tensor zweiter Stufe
ein Tensor zweiter Stufe  im Tensorproduktraum
im Tensorproduktraum  .
Die verschiedenen Notationen verwenden teilweise Fettdruck für Vektoren oder
lassen das Zeichen
.
Die verschiedenen Notationen verwenden teilweise Fettdruck für Vektoren oder
lassen das Zeichen  weg:
weg:

Nicht jeder Tensor zweiter Stufe ist ein dyadisches Produkt von zwei Vektoren, jedoch kann jeder Tensor zweiter Stufe als Summe dyadischer Produkte dargestellt werden. Ein Tensor, der dyadisches Produkt zweier Vektoren ist, heißt einfacher Tensor oder Dyade.
Anwendung findet diese Version des dyadischen Produkts in der Kontinuumsmechanik,
wo meist  identisch mit dem dreidimensionalen Vektorraum
identisch mit dem dreidimensionalen Vektorraum  der geometrischen Vektoren ist.
der geometrischen Vektoren ist.
Ist
ein euklidischer
Vektorraum, so kann mit Hilfe des Skalarprodukts „·“ von
das innere Produkt zwischen Tensoren und Vektoren definiert werden. Es ordnet
jedem Tensor  und Vektoren
und Vektoren  einen Vektor
einen Vektor  zu. Für Dyaden
zu. Für Dyaden  ist das innere Produkt wie folgt definiert:
ist das innere Produkt wie folgt definiert:

Hierdurch kann jede Dyade und damit auch jeder Tensor
als lineare
Abbildung

aufgefasst werden. Der Tensorproduktraum
kann also mit dem Raum  der linearen Abbildungen von
nach
identifiziert werden. Dies wird im Folgenden getan.
der linearen Abbildungen von
nach
identifiziert werden. Dies wird im Folgenden getan.
Für das dyadische Produkt gelten die folgenden Rechenregeln. ,
,
und  ,
seien euklidische Vektorräume. Dann gilt für alle
,
seien euklidische Vektorräume. Dann gilt für alle  :
:
 .
.
Zu beachten ist hier, dass die Skalarprodukte „·“ in den Gleichungen aus den
verschiedenen Vektorräumen stammen, was sich durch einen Index verdeutlicht
beispielsweise wie folgt schreibt:  .
.
Das Skalarprodukt
zweier Tensoren aus
kann mit Vektoren  definiert werden:
definiert werden:

Damit baut
einen euklidischen
Vektorraum auf, dessen Elemente Tensoren zweiter Stufe sind. Mit einer Basis
 von
und
von
und  von
besitzt
eine Basis
von
besitzt
eine Basis  bezüglich der jeder Tensor komponentenweise dargestellt werden kann:
bezüglich der jeder Tensor komponentenweise dargestellt werden kann:

worin
die Dimension von
und  die Dimension von
ist. Der Tensor ist von den verwendeten Basen unabhängig. Bei einem Basiswechsel
ändern sich daher die Komponenten
die Dimension von
ist. Der Tensor ist von den verwendeten Basen unabhängig. Bei einem Basiswechsel
ändern sich daher die Komponenten  auf charakteristische Weise. Von Bedeutung sind Invarianten, die bei
solchen Basiswechseln ihren Wert nicht ändern, siehe z.B. Hauptinvariante.
auf charakteristische Weise. Von Bedeutung sind Invarianten, die bei
solchen Basiswechseln ihren Wert nicht ändern, siehe z.B. Hauptinvariante.
Die Komponenten
können in einer Matrix angeordnet werden, wobei dann die verwendete Basis in
Erinnerung behalten werden muss. Gelegentlich wird z.B.

geschrieben. Ist der Definitionsbereich mit dem Bildbereich identisch, kann
bei Verwendung der Standardbasis
 der Verweis auf die verwendete Basis weggelassen werden und der Tensor geht in
seine Matrixrepräsentation über, z.B.:
der Verweis auf die verwendete Basis weggelassen werden und der Tensor geht in
seine Matrixrepräsentation über, z.B.:
 .
.
In Koordinatendarstellung ist das oben als Matrix definierte dyadische Produkt zweier Spaltenvektoren gerade diese Abbildungsmatrix des Tensors.
Literatur
- Gerd Fischer: Lineare Algebra. 14. Auflage. Vieweg, 2003, ISBN 3-528-03217-0.
- Rudolf Zurmühl: Matrizen und ihre Anwendungen. 7. Auflage. Springer, 1997, ISBN 3-540-61436-2.
- H. Altenbach: Kontinuumsmechanik. Springer Verlag, 2012, ISBN 978-3-642-24118-5.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 28.01. 2021