Eulersche Winkel
Eigenes Koordinatensystem: rot
festes Referenzsystem:blau
Die eulerschen Winkel (oder Euler-Winkel), benannt nach dem
Schweizer Mathematiker Leonhard Euler, sind ein
Satz von drei Winkeln, mit denen die
Orientierung (Drehlage) eines festen Körpers im dreidimensionalen euklidischen Raum
beschrieben werden kann.
Sie werden üblicherweise mit  oder mit
oder mit  bezeichnet. Der Körper kann zum Beispiel ein Kreisel sein (in der theoretischen
Physik) oder ein Fahrzeug, ein Schiff oder ein Flugzeug. In der Astronomie kann
der „Körper“ auch die Bahnellipse eines Himmelskörpers sein.
bezeichnet. Der Körper kann zum Beispiel ein Kreisel sein (in der theoretischen
Physik) oder ein Fahrzeug, ein Schiff oder ein Flugzeug. In der Astronomie kann
der „Körper“ auch die Bahnellipse eines Himmelskörpers sein.
Anstatt der Drehlage eines Körpers können eulersche Winkel auch die Lage eines kartesischen Koordinatensystems in Bezug auf ein anderes kartesisches Koordinatensystem beschreiben und werden deshalb für Koordinatentransformationen verwendet. Oft ist das gedrehte Koordinatensystem an einen gedrehten Körper „angeheftet“. Man spricht dann vom körperfesten Koordinatensystem und nennt das ursprüngliche Koordinatensystem raumfest.
Die Drehlage wird erzeugt, indem der Körper aus seiner Ursprungslage heraus nacheinander um die drei Eulerwinkel um Koordinatenachsen gedreht wird. Für die Wahl der Achsen gibt es verschiedene Konventionen:
- Eigentliche Eulerwinkel: Die erste und die dritte Drehung finden um die gleiche Koordinatenachse statt (z.B. Drehung um z-Achse, x-Achse, z-Achse).
- Kardanwinkel oder Tait-Bryan-Winkel: Alle drei Drehungen werden um verschiedene Koordinatenachsen gedreht (z.B. in der Reihenfolge x-Achse, y-Achse, z-Achse).
Dabei wird entweder bei der zweiten und dritten Drehung um die zuvor gedrehten Koordinatenachsen gedreht (intrinsische Drehungen) oder immer um die ursprünglichen Koordinatenachsen (extrinsische Drehungen).
Die aus den drei Einzeldrehungen zusammengesetzte Drehung kann durch eine Matrix beschrieben werden, die sich entsprechend als Produkt von drei elementaren Drehmatrizen darstellen lässt. Je nach Anwendungszweck betrachtet man verschiedene Matrizen:
- Transformationsmatrix für die Koordinatentransformation vom gedrehten (körperfesten) ins ursprüngliche (raumfeste) Koordinatensystem,
- Transformationsmatrix für die Koordinatentransformation vom raumfesten ins körperfeste Koordinatensystem,
- Abbildungsmatrix der Drehung bezüglich des raumfesten Koordinatensystems.
Geschichte

Drehungen wurden spätestens seit etwa 1600 durch drei Winkel beschrieben. So bestimmte Johannes Kepler in der Astronomia nova die Orientierung der Marsbahn in Bezug auf die Ekliptik durch drei Winkel. Eine algebraische Beschreibung, mit der die Drehlage von beliebigen Punkten berechnet werden konnte, wurde aber erst ab 1775 von Leonhard Euler in zunehmender Tiefe formuliert. zeigte er, dass die neun, den Elementen der Abbildungsmatrix entsprechenden, Koeffizienten wegen der Längentreue einer Bewegung nicht unabhängig voneinander sind, sondern durch nur drei voneinander unabhängige Winkel festgelegt werden. Es handelt sich bei diesen aber nicht um die hier behandelten eulerschen Winkel, sondern um reine Rechengrößen ohne geometrische Bedeutung. Bekannt ist diese Arbeit heute besonders, weil er in einem Zusatz das heute nach ihm benannte Rotationstheorem bewies, nach dem jede Bewegung mit einem Fixpunkt eine Drehung um eine Achse ist. Die aus diesem Ergebnis resultierenden Abbildungsgleichungen, in denen eine Drehung durch die Richtungskosinus der Drehachse und den Drehwinkel parametrisiert wird, fand er in einer kurz darauf folgenden zweiten Arbeit.
.png)
 ,
,
 ,
,
 aus der Arbeit
von Euler
aus der Arbeit
von EulerIn einer dritten, erst postum
erschienenen Arbeit
führte er schließlich drei Winkel ,
und
ein, mit denen er die Transformation von körperfesten in raumfeste Koordinaten
beschrieb und die bis auf Vorzeichen und additive Konstanten mit den heute nach
ihm benannten Winkeln übereinstimmen. Sein Vorgehen unterschied sich dabei
deutlich vom heute gängigen Verfahren, bei dem das eine Koordinatensystem durch
drei aufeinanderfolgende Drehungen um die Koordinatenachsen in das andere
Koordinatensystem überführt wird. Euler argumentiere ähnlich wie bei der ersten
Arbeit, kommt aber zu einem günstigeren Ansatz mit den drei Winkeln ,
und ,
weil er hier – in moderner Sprechweise – nicht nur die Orthonormalität der
Zeilen, sondern auch die der Spalten der Transformationsmatrix verwendete. Zur
Klärung ihrer geometrischen Bedeutung betrachtete er die Schnittpunkte  ,
,
 ,
,
 des raumfesten Koordinatensystems mit der Einheitskugel und die entsprechenden
Schnittpunkte
des raumfesten Koordinatensystems mit der Einheitskugel und die entsprechenden
Schnittpunkte  ,
,
 ,
,
 des körperfesten Systems und zeigte, dass die Kosinusse der Bögen
des körperfesten Systems und zeigte, dass die Kosinusse der Bögen  ,
,
 ,
…,
,
…,  gerade die Koeffizienten der Transformationsgleichungen sind. Es ist also
gerade die Koeffizienten der Transformationsgleichungen sind. Es ist also  der Winkel zwischen der
der Winkel zwischen der  -
und der
-
und der  -Achse.
Außerdem zeigt sich mittels sphärischer
Trigonometrie, dass
der Winkel bei
im Kugeldreieck
-Achse.
Außerdem zeigt sich mittels sphärischer
Trigonometrie, dass
der Winkel bei
im Kugeldreieck  und
der Winkel bei
im Kugeldreieck
und
der Winkel bei
im Kugeldreieck  ist. Heute werden die entsprechenden Winkel nicht von von der
ist. Heute werden die entsprechenden Winkel nicht von von der  -Ebene,
sondern von der zu ihr senkrechten Knotenlinie
-Ebene,
sondern von der zu ihr senkrechten Knotenlinie  aus gemessen; der Zusammenhang mit den heute meist verwendeten Eulerwinkeln für
die Drehfolge x-y-x ist gegeben durch
aus gemessen; der Zusammenhang mit den heute meist verwendeten Eulerwinkeln für
die Drehfolge x-y-x ist gegeben durch  ,
,
 und
und  .
.
Lagrange
brachte in der 1788 erschienenen Mécanique Analytique
zwei Ableitungen der Transformationsgleichungen. Die erste stimmt bis auf die Namen der Winkel (bei ihm
heißen sie  ,
,
 und
und  )
im Wesentlichen mit der von Euler überein. Die zweite deckt sich mit der modernen, unten
ausführlich behandelten Darstellung für die z-x-z-Drehfolge – wiederum mit
anderen Winkelnamen (
)
im Wesentlichen mit der von Euler überein. Die zweite deckt sich mit der modernen, unten
ausführlich behandelten Darstellung für die z-x-z-Drehfolge – wiederum mit
anderen Winkelnamen ( ,
,
 ,
,
 ).
).
Eigentliche Eulerwinkel
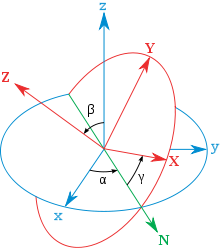
blau: Koordinatensystem in Ausgangslage
grün: Schnittgerade der xy-Ebenen, Zwischenlage der x-Achse
rot: Koordinatensystem in Ziellage
Im Folgenden werden wie in der nebenstehenden Grafik die Achsen des
Koordinatensystems in Ausgangslage (in der Grafik blau) mit den Kleinbuchstaben
,
 und
und  ,
die Achsen in Ziellage (in der Grafik rot) mit den entsprechenden Großbuchstaben
,
,
die Achsen in Ziellage (in der Grafik rot) mit den entsprechenden Großbuchstaben
,
 und
und  bezeichnet.
bezeichnet.
Geometrische Beschreibung
Die --Ebene
und die --Ebene
schneiden sich in einer Geraden
(Knotenlinie). Diese steht senkrecht auf der -Achse
und auf der -Achse.
- Der erste Euler-Winkel
 (auch
(auch  )
ist der Winkel zwischen der -Achse
und der Geraden
(gemessen in Richtung der y-Achse).
)
ist der Winkel zwischen der -Achse
und der Geraden
(gemessen in Richtung der y-Achse). - Der zweite Euler-Winkel
 (auch
(auch  )
ist der Winkel zwischen der -Achse
und der -Achse.
)
ist der Winkel zwischen der -Achse
und der -Achse. - Der dritte Euler-Winkel
 (auch
(auch  )
ist der Winkel zwischen
und der -Achse.
)
ist der Winkel zwischen
und der -Achse.
Die hier beschriebene Version der eulerschen Winkel, bei der der Winkel
von der -Achse
aus zur Knotenlinie und der Winkel
von der Knotenlinie zur -Achse
gemessen wird, nennt man die Standard-x-Konvention. Entsprechend werden
bei der Standard-y-Konvention die Winkel von der -Achse
zur Knotenlinie und von der Knotenlinie zur -Achse
gemessen.
In der Physik wird meist die Standard-x-Konvention verwendet. Statt wie hier
mit ,
und
werden die Winkel meist mit ,
und
bezeichnet.
Beschreibung durch intrinsische Drehungen
Die Drehung ,
welche das  -System
in das
-System
in das  -System
dreht, kann in drei Drehungen aufgeteilt werden. Bei der Standard-x-Konvention
sind das:
-System
dreht, kann in drei Drehungen aufgeteilt werden. Bei der Standard-x-Konvention
sind das:
- Zunächst die Drehung
 um den Winkel
um die -Achse,
um den Winkel
um die -Achse, - dann die Drehung
 um den Winkel
um die Knotenlinie ,
um den Winkel
um die Knotenlinie , - zuletzt die Drehung
 um den Winkel
um die -Achse.
um den Winkel
um die -Achse.
Bei diesen Drehungen entstehen nacheinander neue Koordinatensysteme:
- ursprüngliches Koordinatensystem: -,
-
und -Achse
- nach der ersten Drehung:
 -,
-,
 -
und
-
und  -Achse
-Achse - nach der zweiten Drehung:
 -,
-,
 -
und
-
und  -Achse
-Achse - nach der dritten Drehung:
 -,
-,
 -
und
-
und  -Achse
(bzw. -,
-
und -Achse)
-Achse
(bzw. -,
-
und -Achse)
Die Drehung um
ist also eine Drehung um die -Achse,
die Drehung um die -Achse
eine Drehung um die -Achse.
Die Gesamtdrehung
setzt sich also aus den Drehungen ,
 und
und  zusammen:
zusammen:

Die Reihenfolge der Drehachsen ist also: -Achse
→ -Achse
→ -Achse
oder kurz --.
Eine solche Zerlegung in Drehungen, bei denen jeweils um die mitgedrehten Koordinatenachsen gedreht wird, nennt man intrinsische Drehfolge.
Beschreibung durch extrinsische Drehungen
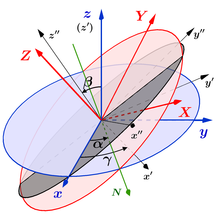 --
mit den Winkeln ,
,
.
blau: Ausgangslage des
Koordinatensystems, rot: Ziellage,
grün: Schnittgerade der beiden
xy-Ebenen.
--
mit den Winkeln ,
,
.
blau: Ausgangslage des
Koordinatensystems, rot: Ziellage,
grün: Schnittgerade der beiden
xy-Ebenen.Dieselbe Drehung
kann auch durch drei Einzeldrehungen um die ursprünglichen Koordinatenachsen
beschrieben werden. Dabei bleiben die Winkel gleich, aber die Reihenfolge der
Drehungen kehrt sich um, und die Zwischenlagen  und
und  sind andere als bei der intrinsischen Drehung: Zuerst wird der Körper um den
Winkel
um die -Achse
gedreht, dann um
um die -Achse
(der Winkel zwischen der -
und -Achse
ist derselbe wie der zwischen der -
und der -Achse,
nämlich )
und zuletzt um den Winkel
um die -Achse
(dabei wird die -Achse
in die Knotenlinie
gedreht und der Winkel zwischen
und der -Achse
ist ).
Eine algebraische Begründung findet sich weiter unten im Abschnitt Matrix-Herleitung
im allgemeinen Fall. Es ist also
sind andere als bei der intrinsischen Drehung: Zuerst wird der Körper um den
Winkel
um die -Achse
gedreht, dann um
um die -Achse
(der Winkel zwischen der -
und -Achse
ist derselbe wie der zwischen der -
und der -Achse,
nämlich )
und zuletzt um den Winkel
um die -Achse
(dabei wird die -Achse
in die Knotenlinie
gedreht und der Winkel zwischen
und der -Achse
ist ).
Eine algebraische Begründung findet sich weiter unten im Abschnitt Matrix-Herleitung
im allgemeinen Fall. Es ist also
 .
.
Eine solche Drehfolge, bei der immer um die ursprünglichen Koordinatenachsen gedreht wird, heißt extrinsische Drehfolge.
Die Beschreibungen durch intrinsische und durch extrinsische Drehungen sind also äquivalent. Die Beschreibung durch intrinsische Drehungen ist jedoch anschaulicher, während die Beschreibung durch extrinsische Drehungen mathematisch leichter zugänglich ist.
Beschreibung durch Matrizen
Die Drehungen um die Eulerschen Winkel können mit Hilfe von Drehmatrizen, deren Einträge Sinus- und Kosinus-Werte der Euler-Winkel sind, beschrieben werden. Dabei unterscheidet man zwischen Abbildungsmatrizen und Koordinatentransformationsmatrizen. Im Folgenden werden diese Matrizen für die Standard-x-Konvention angegeben. Die Matrizen für die Standard-y-Konvention erhält man analog, indem man statt der elementaren Drehmatrix für die Drehung um die x-Achse die Drehmatrix für die Drehung um die y-Achse verwendet.
Abbildungsmatrix (aktive Drehung)
Bei einer aktiven Drehung (Alibi-Drehung) werden die Punkte und
Vektoren des
Raums gedreht. Das Koordinatensystem wird festgehalten. Die Drehmatrix  ist die Abbildungsmatrix
dieser Abbildung.
Die Koordinaten des gedrehten Vektors
ist die Abbildungsmatrix
dieser Abbildung.
Die Koordinaten des gedrehten Vektors  ergeben sich aus den Koordinaten des ursprünglichen Punkts
ergeben sich aus den Koordinaten des ursprünglichen Punkts  durch Multiplikation
mit der Drehmatrix:
durch Multiplikation
mit der Drehmatrix:

Die Abbildungsmatrizen für Drehungen um die Koordinatenachsen (elementare Drehmatrizen) lauten:

für die Drehung um den Winkel
um die -Achse,
die -Achse
und die -Achse.
Die Drehmatrix der zusammengesetzten Drehung erhält man durch Matrixmultiplikation aus den Matrizen der einzelnen Drehungen. Da die elementaren Drehmatrizen die Drehungen um die ursprünglichen Koordinatenachsen beschreiben, verwendet man die extrinsische Drehfolge
und erhält die Abbildungsmatrix

Transformationsmatrix
Transformationsmatrizen beschreiben Koordinatentransformationen vom
ursprünglichen (raumfesten) Koordinatensystem ins gedrehte (körperfeste) oder
umgekehrt. Die Transformationsmatrix für die Koordinatentransformation vom
körperfesten Koordinatensystem ins raumfeste stimmt mit der oben beschriebenen
Abbildungsmatrix überein, die Matrix für die umgekehrte Transformation ist die
Transponierte dieser Matrix. Hat der Vektor
im raumfesten Koordinatensystem die Koordinaten  und im körperfesten die Koordinaten
und im körperfesten die Koordinaten  ,
so gilt
,
so gilt

und

Konventionen
Es gibt sechs verschiedene Möglichkeiten, die Achsen für eigentliche Eulerwinkel zu wählen. Bei allen ist die erste und die dritte Achse die gleiche. Die sechs Möglichkeiten sind:
- --
(intrinsisch) bzw. --
(extrinsisch): Standard-x-Konvention
- --
(intrinsisch) bzw. --
(extrinsisch): Standard-y-Konvention
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
Kardan-Winkel
Bei den Kardan-Winkeln (nach Gerolamo Cardano) oder auch Tait-Bryan-Winkeln (benannt nach Peter Guthrie Tait und George Hartley Bryan) erfolgen die drei Drehungen um drei verschiedene Achsen. Wie bei den eigentlichen Eulerwinkeln gibt es sechs mögliche Drehfolgen:
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
- --
(intrinsisch) bzw. --
(extrinsisch)
Roll-, Nick- und Gierwinkel: z-y′-x″-Konvention
Beschreibung
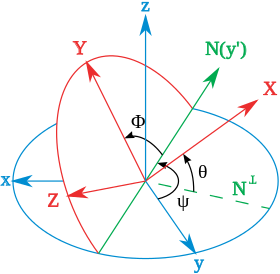
blau: raumfestes Koordinatensystem
grün: y'-Achse = Knotenlinie N(y′)
rot: körperfestes Koordinatensystem
Anmerkung:
ist hier negativ.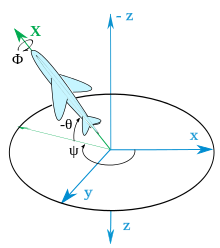
 als Lagewinkel eines Flugzeugs
als Lagewinkel eines FlugzeugsDie in der Luftfahrt, Schifffahrt und dem Automobilbau angewendeten und
genormten (Luftfahrt: DIN
9300; Automobilbau: DIN
ISO 8855) Drehfolgen gehören in die Gruppe der Tait-Bryan-Drehungen. In den
Normen sind die Namen Gier-,
Nick- und Roll-Winkel (engl. yaw, pitch and roll angle)
für die drei Euler-Winkel vorgeschrieben. Durch die drei Drehungen wird das
erdfeste -System
(engl. world frame) in das körperfeste -Koordinatensystem
(engl. body frame) gedreht.
Intrinsische Reihenfolge --
(Gier-Nick-Roll-Winkel):
- Mit dem im erdfesten System gemessenen Gierwinkel
(auch Steuerkurs oder Azimut genannt) wird um die -Achse
gedreht. Die -Achse
wird zur Knotenachse
 .
.
Hauptwertebereich: .
Die Drehrichtung ist mathematisch positiv (gegen den Uhrzeigersinn)
.
Die Drehrichtung ist mathematisch positiv (gegen den Uhrzeigersinn) - Mit dem gegen die Erdoberfläche (--Ebene)
gemessenen Nickwinkel
wird um die Knotenachse
gedreht. Es entsteht die fahrzeugfeste -Achse.
Hauptwertebereich: .
Die Drehrichtung ist mathematisch positiv.
.
Die Drehrichtung ist mathematisch positiv.
- Der Rollwinkel
(auch Wankwinkel genannt) beschreibt die Drehung um die fahrzeugfeste -Achse.
Es entstehen die fahrzeugfesten Achsen
und .
Hauptwertebereich: .
Die Drehrichtung ist mathematisch positiv.
.
Die Drehrichtung ist mathematisch positiv.
Extrinsisch entspricht dies der Reihenfolge --
(Roll-Nick-Gier-Winkel).
Statt der Kleinbuchstaben ,
und
werden auch die entsprechenden Großbuchstaben  ,
,
 und
und  verwendet.
verwendet.
Transformationsmatrizen
Die Koordinatentransformation vom körperfesten ins raumfeste Koordinatensystem wird durch die Matrix

beschrieben. Die umgekehrte Transformation vom raumfesten ins körperfeste Koordinatensystem wird durch die Transponierte dieser Matrix beschrieben. (Eigentlich die Inverse, aber bei Drehmatrizen stimmt die inverse mit der transponierten Matrix überein.)

Das bedeutet: Hat der Vektor
im raumfesten System die Koordinaten  ,
,
 ,
,
 und im körperfesten System die Koordinaten
und im körperfesten System die Koordinaten  ,
,
 ,
,
 ,
so gilt
,
so gilt

und

Anwendungsbeispiel
Der Gewichtsvektor  hat im erdfesten -Koordinatensystem
nur eine -Komponente
(in Richtung Erdmittelpunkt):
hat im erdfesten -Koordinatensystem
nur eine -Komponente
(in Richtung Erdmittelpunkt):

Die Transformation ins flugzeugfeste Koordinatensystem geschieht dann durch
Multiplikation des erdfesten Gewichtsvektors  mit der Transformationsmatrix
mit der Transformationsmatrix  :
:

Physikalisch richtig wirkt die Gewichtskraft
bei vorhandenem Nickwinkel
im Flugzeug beispielsweise auch nach hinten (in negative -Richtung).
Matrix-Herleitung im allgemeinen Fall
Für eine beliebige Wahl der Drehachsenreihenfolge kann die sich ergebende Drehmatrix durch die Zuhilfenahme des folgenden Zusammenhangs einfach hergeleitet werden (aktive Drehungen):
Die Drehmatrizen um die globalen Achsen sind bekannt. Wenn nun um eine bereits gedrehte Achse erneut gedreht werden soll, dann entspricht das der Drehmatrix um die entsprechende globale Achse, allerdings in einer transformierten Vektorbasis. Die Transformationsmatrix (Basiswechselmatrix) ist dabei gerade die vorhergehende Drehung.
Seien
und
zwei Drehmatrizen um die beiden globalen Achsen  und
und  .
Zur Berechnung der Drehmatrix zu der Reihenfolge
.
Zur Berechnung der Drehmatrix zu der Reihenfolge  beobachtet man, dass die Drehmatrix für die zweite Drehung um
der basistransformierten Matrix
beobachtet man, dass die Drehmatrix für die zweite Drehung um
der basistransformierten Matrix  entsprechen muss. Dadurch erhält man für die resultierende Gesamtdrehmatrix
entsprechen muss. Dadurch erhält man für die resultierende Gesamtdrehmatrix
 .
Für eine größere Anzahl von Drehungen erfolgt der Nachweis analog.
.
Für eine größere Anzahl von Drehungen erfolgt der Nachweis analog.
Bei drei aktiven Drehungen (A wird zuerst ausgeführt, dann B, dann C) ergibt
sich die Gesamtdrehmatrix  unter Verwendung von
unter Verwendung von  ,
,
 .
.
Durch diese Darstellung ergibt sich, dass sich die Drehmatrix für eine beliebige Drehreihenfolge in nacheinander gedrehten Achsen durch die einfache Multiplikation von Drehmatrizen um globale Koordinatenachsen ergibt – allerdings in umgekehrter Reihenfolge.
Ergebnis, Interpretation
Das erhaltene Koordinatensystem mit den Achsen  ,
,
 und
und  ist das sogenannte körperfeste System. Die Winkel
ist das sogenannte körperfeste System. Die Winkel  und
geben dabei die Lage der -Achse
gegenüber dem körperfesten System an („Drehung“ und „Kippung“); der Winkel
beschreibt die Eigendrehung des Körpers um sie. Dem entsprechen folgende
Namenskonventionen:
und
geben dabei die Lage der -Achse
gegenüber dem körperfesten System an („Drehung“ und „Kippung“); der Winkel
beschreibt die Eigendrehung des Körpers um sie. Dem entsprechen folgende
Namenskonventionen:
- Flugsteuerung (Rollwinkel, Nickwinkel, Gierwinkel)
- Kreiseltheorie: Präzession, Nutation und Spin oder Eigenrotation
- Azimut, Höhenwinkel oder Elevation und Rotation
Mathematische Eigenschaften
Die Abbildung, die den Euler-Winkeln die zugehörige Drehmatrix zuordnet,
besitzt kritische
Punkte, in denen diese Zuordnung nicht lokal umkehrbar ist und man von einem
Gimbal
Lock spricht. Im Fall der og. x- oder y-Konvention tritt dieser stets dann
auf, wenn der zweite Rotationswinkel gleich null wird und der Drehvektor der ersten
Drehung damit derselbe ist wie der Drehvektor der zweiten Drehung. Das aber
bedeutet, dass es für eine Rotation um die -Achse
beliebig viele Euler-Winkel mit  gibt.
gibt.
Bei der Definition der Lagewinkel nach der Luftfahrtnorm liegen die
kritischen Punkte bei  .
.
Nach Kurt Magnus
ist bei Kreisel-Problemen, bei denen  möglich ist, die Beschreibung mit Eulerwinkeln (x-Konvention) nicht möglich und
man verwendet stattdessen Kardanwinkel.
möglich ist, die Beschreibung mit Eulerwinkeln (x-Konvention) nicht möglich und
man verwendet stattdessen Kardanwinkel.
Nachteile, Alternativen
Zur Darstellung von Drehungen haben Euler-Winkel mehrere Nachteile:
- Die oben erwähnte Singularität führt dazu, dass eine einzige Drehung durch unterschiedliche Euler-Drehungen ausgedrückt werden kann. Dies führt zu einem Phänomen, das als Gimbal Lock bekannt ist.
- Die korrekte Kombination von Drehungen im Euler-System ist nicht intuitiv anzugeben, da sich die Drehachsen verändern.
Anstatt mit den Eulerwinkeln kann man jede Drehung auch durch einen Vektor angeben, der durch seine Orientierung die Lage der Achse und den Drehsinn angibt, und durch seinen Betrag den Drehwinkel. Eine andere Möglichkeit, die Orientierung zu beschreiben und teils diese Nachteile zu umgehen, sind Quaternionen.
Anwendungen

| Roll-Nick-Gier-Winkel (Eulerwinkel) | |
|---|---|
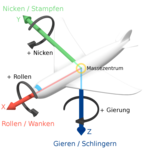 | |
| Rotationsachsen: | Bewegung: |
| ↙ Längsachse (Roll-/Wankachse): | Rollen, Wanken |
| ↖ Querachse (Nickachse): | Nicken, Stampfen |
| ↓ Vertikalachse (Gierachse): | Gieren (Schlingern) |
In der Theoretischen Physik werden die eulerschen Winkel zur Beschreibung des Starren Körpers benutzt. Eine praktische Anwendung ergibt die bekannte kardanische Aufhängung der technischen Mechanik.
Bei Fahrzeugen bezeichnet man die Euler-Winkel der Hauptlagen als Roll-Nick-Gier-Winkel.
In der Kristallographie werden die eulerschen Winkel zur Beschreibung der Kreise des Einkristalldiffraktometers (mit einer kardanischen Aufhängung aus zwei senkrecht aufeinander stehenden Drehkreisen, die den Euler-Winkeln entspricht und Euler-Wiege genannt wird) und zur Beschreibung der Orientierungsdichteverteilungsfunktion von Texturen verwendet.
In der Astronomie sind die eulerschen Winkel unter anderen Bezeichnungen als Bahnelement eines Objekts geläufig.
In der Computergrafik werden die eulerschen Winkel zur Beschreibung der Orientierung eines Objektes verwendet.
In der Festkörper-NMR werden die eulerschen Winkel zur theoretischen Beschreibung und zur Simulation von Spektren benutzt.


© biancahoegel.de;
Datum der letzten Änderung: Jena, den: 23.07. 2023