Koordinatenraum
Der Koordinatenraum, Standardraum oder
Standardvektorraum ist in der Mathematik
der Vektorraum der  -Tupel mit
Komponenten aus einem gegebenen Körper
versehen mit der komponentenweisen Addition
und Skalarmultiplikation.
Die Elemente des Koordinatenraums nennt man entsprechend Koordinatenvektoren
oder Koordinatentupel. Die Standardbasis
für den Koordinatenraum besteht aus den kanonischen Einheitsvektoren. Lineare Abbildungen
zwischen Koordinatenräumen werden durch Matrizen
dargestellt. Die Koordinatenräume besitzen in der linearen Algebra eine
besondere Bedeutung, da jeder endlichdimensionale Vektorraum zu einem
Koordinatenraum isomorph
(strukturell gleich) ist.
-Tupel mit
Komponenten aus einem gegebenen Körper
versehen mit der komponentenweisen Addition
und Skalarmultiplikation.
Die Elemente des Koordinatenraums nennt man entsprechend Koordinatenvektoren
oder Koordinatentupel. Die Standardbasis
für den Koordinatenraum besteht aus den kanonischen Einheitsvektoren. Lineare Abbildungen
zwischen Koordinatenräumen werden durch Matrizen
dargestellt. Die Koordinatenräume besitzen in der linearen Algebra eine
besondere Bedeutung, da jeder endlichdimensionale Vektorraum zu einem
Koordinatenraum isomorph
(strukturell gleich) ist.
Die zwei- und dreidimensionalen reellen Koordinatenräume dienen oft als Modelle für die euklidische Ebene und den dreidimensionalen euklidischen Raum. In diesem Fall werden ihre Elemente sowohl als Punkte wie auch als Vektoren aufgefasst.
Definition
Ist  ein Körper
und
eine natürliche
Zahl, so ist das -fache
kartesische
Produkt
ein Körper
und
eine natürliche
Zahl, so ist das -fache
kartesische
Produkt

die Menge
aller -Tupel .
Für diese Tupel definiert man nun eine komponentenweise Addition  durch
durch

sowie eine komponentenweise Multiplikation
mit einem Skalar  durch
durch
 .
.
Auf diese Weise erhält man einen Vektorraum
 ,
der als Koordinatenraum oder Standardraum der Dimension
über dem Körper
bezeichnet wird.
Seine Elemente nennt man Koordinatenvektoren
oder Koordinatentupel.
,
der als Koordinatenraum oder Standardraum der Dimension
über dem Körper
bezeichnet wird.
Seine Elemente nennt man Koordinatenvektoren
oder Koordinatentupel.
Darstellung mit Spaltenvektoren
Die Koordinatenvektoren notiert man häufig auch als Spaltenvektoren. Die Vektoraddition und Skalarmultiplikation entsprechen dann einer zeilenweisen Addition der Vektorkomponenten beziehungsweise einer zeilenweisen Multiplikation mit einem Skalar:
 .
.
Diese Operationen sind dann Spezialfälle der Matrizenaddition und der Skalarmultiplikation einspaltiger Matrizen.
Beispiele
Wichtige Beispiele für Koordinatenräume entstehen durch die Wahl der reellen
Zahlen als zugrunde liegenden Körper. Im eindimensionalen Koordinatenraum
 entsprechen die Vektorraumoperationen gerade der normalen Addition und
Multiplikation von Zahlen. Im zweidimensionalen reellen Koordinatenraum
entsprechen die Vektorraumoperationen gerade der normalen Addition und
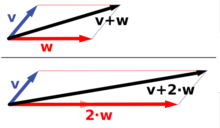
Multiplikation von Zahlen. Im zweidimensionalen reellen Koordinatenraum  können Zahlenpaare als Ortsvektoren
in der euklidischen
Ebene interpretiert werden. Die beiden Komponenten sind dann gerade die
Koordinaten des Endpunkts eines Ortsvektors in einem kartesischen
Koordinatensystem. Auf diese Weise entspricht die Vektoraddition
können Zahlenpaare als Ortsvektoren
in der euklidischen
Ebene interpretiert werden. Die beiden Komponenten sind dann gerade die
Koordinaten des Endpunkts eines Ortsvektors in einem kartesischen
Koordinatensystem. Auf diese Weise entspricht die Vektoraddition

anschaulich der Addition der zugehörigen Vektorpfeile und die Multiplikation eines Vektors mit einer Zahl
 .
.
der Streckung (oder Stauchung) des zugehörigen Vektorpfeils um den Faktor
 .
Insbesondere erhält man durch die Vektoraddition oder Skalarmultiplikation
wieder einen Vektor in der euklidischen Ebene. Entsprechend können die Tupel des
dreidimensionalen reellen Koordinatenraums
.
Insbesondere erhält man durch die Vektoraddition oder Skalarmultiplikation
wieder einen Vektor in der euklidischen Ebene. Entsprechend können die Tupel des
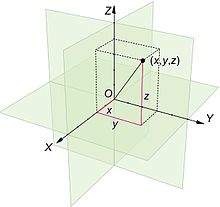
dreidimensionalen reellen Koordinatenraums  als Ortsvektoren im euklidischen
Raum interpretiert werden. In höheren Dimensionen funktioniert diese
Konstruktion ganz analog, auch wenn die Koordinatenvektoren des
als Ortsvektoren im euklidischen
Raum interpretiert werden. In höheren Dimensionen funktioniert diese
Konstruktion ganz analog, auch wenn die Koordinatenvektoren des  dann nicht mehr so anschaulich interpretiert werden können.
dann nicht mehr so anschaulich interpretiert werden können.
Eigenschaften
Neutrales und inverses Element
Das neutrale Element im Koordinatenraum ist der Nullvektor
 ,
,
wobei  das Nullelement
des Körpers
ist. Das zu einem Vektor
das Nullelement
des Körpers
ist. Das zu einem Vektor  inverse
Element ist dann der Vektor
inverse
Element ist dann der Vektor
 ,
,
wobei  für
für  jeweils das additiv inverse Element zu
jeweils das additiv inverse Element zu  in
ist.
in
ist.
Gesetze
Der Koordinatenraum erfüllt die Axiome
eines Vektorraums. Neben der Existenz eines neutralen und inversen Elements
gelten für Koordinatenvektoren  und Skalare
und Skalare 
- das Assoziativgesetz
 ,
, - das Kommutativgesetz
 ,
, - das gemischte Assoziativgesetz
 ,
, - die Distributivgesetze
 und
und  sowie
sowie - die Neutralität
der Eins
 ,
wobei
,
wobei  das Einselement
des Körpers
ist.
das Einselement
des Körpers
ist.
Diese Gesetze folgen direkt aus der Assoziativität, der Kommutativität und
der Distributivität der Addition und Multiplikation im Körper
durch Anwendung auf jede Komponente eines Koordinatentupels.
Basis
Die Standardbasis für den Koordinatenraum besteht aus den kanonischen Einheitsvektoren
 .
.
Jeder Vektor  lässt sich somit als Linearkombination
lässt sich somit als Linearkombination

der Basisvektoren darstellen. Die Dimension des Koordinatenraums ergibt sich demnach zu
 .
.
Durch Basistransformation
der Standardbasis können weitere Basen
des Koordinatenraums ermittelt werden. Dabei bilden die Spalten- oder
Zeilenvektoren einer  -Matrix
genau dann eine Basis des Koordinatenraums
-Matrix
genau dann eine Basis des Koordinatenraums  ,
wenn die Matrix regulär
ist, also vollen Rang
besitzt.
,
wenn die Matrix regulär
ist, also vollen Rang
besitzt.
Lineare Abbildungen
Die linearen
Abbildungen zwischen zwei Koordinatenräumen entsprechen eindeutig den
Matrizen mit Einträgen aus dem Körper: Ist  eine Matrix mit
eine Matrix mit  Zeilen und
Spalten, dann wird durch das Matrix-Vektor-Produkt
eine lineare Abbildung
Zeilen und
Spalten, dann wird durch das Matrix-Vektor-Produkt
eine lineare Abbildung

definiert. Umgekehrt gibt es zu jeder linearen Abbildung  eine eindeutig bestimmte Abbildungsmatrix
eine eindeutig bestimmte Abbildungsmatrix
 ,
sodass
,
sodass  für alle .
Die Spalten von
für alle .
Die Spalten von  ergeben sich dabei als die Bilder der Standardbasisvektoren:
ergeben sich dabei als die Bilder der Standardbasisvektoren:
 .
.
Die Menge der Matrizen bildet mit der Matrizenaddition und der Skalarmultiplikation selbst wieder einen Vektorraum, den Matrizenraum.
Isomorphie
Ist nun  ein beliebiger -dimensionaler
Vektorraum über dem Körper ,
dann ist
isomorph zu dem
entsprechenden Koordinatenraum ,
also
ein beliebiger -dimensionaler
Vektorraum über dem Körper ,
dann ist
isomorph zu dem
entsprechenden Koordinatenraum ,
also
 .
.
Wählt man nämlich eine Basis
 für ,
so hat jeder Vektor
für ,
so hat jeder Vektor  die Darstellung
die Darstellung

mit  .
Jeder Vektor
lässt sich so eindeutig als Koordinatentupel
.
Jeder Vektor
lässt sich so eindeutig als Koordinatentupel  darstellen. Umgekehrt entspricht jedem solchen Koordinatentupel aufgrund der linearen
Unabhängigkeit der Basisvektoren genau ein Vektor aus .
Demnach ist die Abbildung
darstellen. Umgekehrt entspricht jedem solchen Koordinatentupel aufgrund der linearen
Unabhängigkeit der Basisvektoren genau ein Vektor aus .
Demnach ist die Abbildung

bijektiv.
Nachdem die Abbildung zudem linear ist, stellt sie einen Isomorphismus zwischen
dem Koordinatenraum
und dem Vektorraum
dar.
Da auf diese Weise jeder -dimensionale
Vektorraum über dem Körper
zum Koordinatenraum
isomorph ist, sind auch alle -dimensionalen
Vektorräume über dem gleichen Körper untereinander isomorph.
Diese Identifizierung endlichdimensionaler Vektorräume mit dem zugehörigen Koordinatenraum erklärt auch den Namen „Standardraum“. Dennoch arbeitet man in der linearen Algebra häufig lieber mit abstrakten Vektorräumen statt mit Koordinatenräumen, da man in der Theorie gerne koordinatenfrei, das heißt ohne eine besonders ausgewählte Basis, argumentieren möchte. Für konkrete Berechnungen greift man dann wieder auf den Koordinatenraum zurück und rechnet mit den Koordinatenvektoren.
Erweiterungen
Der Koordinatenraum kann beispielsweise um folgende mathematische Strukturen erweitert werden:
- Wird ein reeller oder komplexer Koordinatenraum mit einem Skalarprodukt versehen, beispielsweise dem Standardskalarprodukt, erhält man einen Skalarproduktraum. Da dieser Raum bezüglich der von dem Skalarprodukt induzierten Metrik vollständig ist, handelt es sich dabei sogar um einen Hilbertraum.
- Wird ein reeller oder komplexer Koordinatenraum mit einer Vektornorm versehen, beispielsweise der euklidischen Norm oder einer anderen p-Norm, erhält man einen normierten Raum. Auch dieser Raum ist dann bezüglich der von der Norm induzierten Metrik vollständig, also ein Banachraum.
- Wird ein Koordinatenraum mit einer Topologie versehen, beispielsweise der Standardtopologie, erhält man einen topologischen Vektorraum, das heißt die Vektoraddition und die Skalarmultiplikation sind dann stetige Operationen.
Literatur
- Gerd Fischer: Lineare Algebra: eine Einführung für Studienanfänger. Springer, 2008, ISBN 3-8348-9574-1.
- Herbert Amann, Joachim Escher: Analysis I. Springer, 2006, ISBN 3-7643-7756-9.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 14.12. 2025